基于飞轮储能的新型动态电压恢复器的研究 (1)
时间:11-17
来源:互联网
点击:
随着工业规模的不断扩大,接入电力系统的冲击性负荷急剧增加,电能质量问题变得越来越严重,从而造成产品质量下降甚至生产过程中断。根据各国学者和电力部门统计,在电力系统的各种电能质量问题中,电压暂降的危害最大。目前,最有效的补偿装置是动态电压恢复器(DVR)。
传统的DVR在补偿电压暂降时,其所需能量由并联于所补偿电网的整流器提供,缺点是不能补偿深度电压暂降。因此有学者提出由储能装置来提供能量。常见的储能装置有:蓄电池、超级电容、超导储能装置以及飞轮储能装置。与其他几种储能方式相比,飞轮储能具有高储能量、长寿命、高效率、无污染等特性。因此在飞轮电池以及工业用UPS电源等领域得到广泛应用。飞轮储能是一高速旋转的飞轮质体作为机械能量储存的介质,利用电机和能量转换控制系统来控制能量的输入(储存能)和输出(释放能)。目前,产品化的飞轮储能单元最高指标通常为储能量2~5 kWh,功率250 kW,若要求更高功率、更大储能量则需采用飞轮储能单元并联运行来实现。文献对多台飞轮并联运行的控制策略进行了研究,提出了一种以飞轮可释放能量为比例分配各台飞轮储能装置输出功率的控制策略,此控制策略会导致各台并联飞轮的充放电次数不均匀。
针对以上不足,本文提出了一种基于飞轮储能的新型动态电压恢复器;详细分析了该系统的工作原理和各部分的控制策略;针对飞轮并联运行提出了一种新的放电控制策略;最后对系统进行了仿真验证。
1 电路拓扑
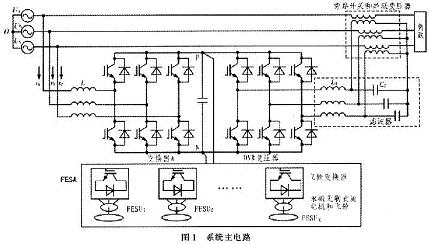
基于飞轮储能的DVR的拓扑结构如图l所示,其主要由DVR变换器、滤波器、旁路开关、串联变压器、变换器A、电感L和飞轮储能阵列(FESA)组成。
DVR变换器、滤波器、旁路开关和串联变压器一起组成串联型电压恢复器,变换器A和电感L构成PWM整流器,飞轮储能阵列由多台飞轮储能单元(FESU)并联组成,飞轮储能单元由飞轮变换器、永磁无刷直流电机和飞轮3部分组成。电网电压正常时,飞轮处于充电状态:在电网电压发生暂降时,DVR变换器经串联变压器向电网注入补偿电压,从而保证负载电压是额定电压。浅度电压暂降时能量由电网提供;深度电压暂降时能量由飞轮提供。
驱动电机采用三相永磁无刷直流电机,因其具有运行可靠、免维护、高效率以及调速性能好的特点,其主要参数如表l所示。
2 系统的控制策略
2.1飞轮充电控制
飞轮的充电控制采用双环控制结构,外环是转速环,内环是电流环。其中,速度调节器采用复合控制。在启动阶段,希望转速快速上升,而对控制精度要求相对较低,采用恒转矩限流启动;在调速阶段,采用恒功率充电模式,随着转速的升高,输入电流反比减小,可以减小不平衡磁拉力对转子稳定性的影响,恒功率充电以系统能承受的最大功率P*为加速度功率;当速度达到稳态时,希望有较高的稳态精度,采用PI控制。
2.2 飞轮放电控制
在飞轮放电过程中,电机运行于制动状态,随着转速的降低,电压也随之降低。为了得到恒定的直流母线电压,采用电机回馈制动的半桥调制方式。
各台并联飞轮属于同一规格,电气参数基本一致;前后两次电压暂降间隔足以让所有飞轮转速都上升到额定转速,故功率和储能量相等;为了减少系统损耗,每次放电时投入运行的飞轮个数应尽可能少。飞轮放电控制的关键点是如何计算放电的飞轮台数以及每台飞轮的输出电流指令值。
各台飞轮的充放电次数为:T1≥T2≥…,≥TN,则放电控制策略如下:
1)按照充放电次数由少到多依次给各台飞轮排序,如充放电次数相同,则转速高者序列号小。
2)根据式(1)确定进入放电状态的飞轮台数m。
式中,Pmaxi为i台飞轮的最大输出功率;P*是需要输出的功率指令值。
3)当P*<Pmax1,FESU1进入放电状态,其输出电流指令值为: ,其中E1为BLDCM1的反电动势;当P*>Pmax1,输出功率指令值超出任意一台飞轮储能单元的最大输出功率。因此,需多台飞轮进入放电状态,FESU1至FESUm-1的输出电流指令值为:
,其中E1为BLDCM1的反电动势;当P*>Pmax1,输出功率指令值超出任意一台飞轮储能单元的最大输出功率。因此,需多台飞轮进入放电状态,FESU1至FESUm-1的输出电流指令值为: ,FESUm的输出电流指令值为
,FESUm的输出电流指令值为 。
。
随着能量的释放,飞轮转速下降,故储能量和输出功率随之减小,当原有投入放电的飞轮不能满足负载需求时,投入放电的飞轮台数以及各台飞轮的输出电流指令值需重新计算。
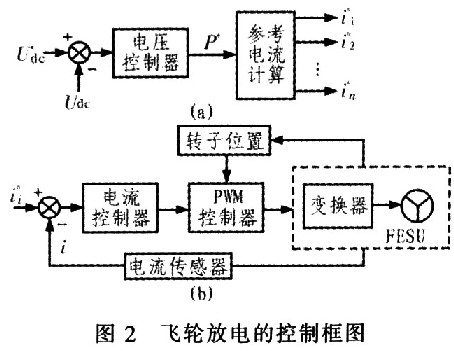
将之前进入放电状态的飞轮的序列号都增加1,然后返回1)重新计算。当电网电压恢复正常时,投入放电状态的飞轮的充放电次数都增加1。由上述分析可得飞轮放电的控制框图如图2所示。
2.3 DVR变换器的控制
补偿电压的输出需同时实现两个目标:高动态响应速度和高稳定精度。前馈控制可以显著提高系统的动态响应速度,缩短补偿电压发出的时间。反馈控制可以提高系统的稳定裕度。因此,采用由前馈控制、电压瞬时值和滤波电容电流瞬时值反馈控制构成的复合控制策略。
传统的DVR在补偿电压暂降时,其所需能量由并联于所补偿电网的整流器提供,缺点是不能补偿深度电压暂降。因此有学者提出由储能装置来提供能量。常见的储能装置有:蓄电池、超级电容、超导储能装置以及飞轮储能装置。与其他几种储能方式相比,飞轮储能具有高储能量、长寿命、高效率、无污染等特性。因此在飞轮电池以及工业用UPS电源等领域得到广泛应用。飞轮储能是一高速旋转的飞轮质体作为机械能量储存的介质,利用电机和能量转换控制系统来控制能量的输入(储存能)和输出(释放能)。目前,产品化的飞轮储能单元最高指标通常为储能量2~5 kWh,功率250 kW,若要求更高功率、更大储能量则需采用飞轮储能单元并联运行来实现。文献对多台飞轮并联运行的控制策略进行了研究,提出了一种以飞轮可释放能量为比例分配各台飞轮储能装置输出功率的控制策略,此控制策略会导致各台并联飞轮的充放电次数不均匀。
针对以上不足,本文提出了一种基于飞轮储能的新型动态电压恢复器;详细分析了该系统的工作原理和各部分的控制策略;针对飞轮并联运行提出了一种新的放电控制策略;最后对系统进行了仿真验证。
1 电路拓扑
基于飞轮储能的DVR的拓扑结构如图l所示,其主要由DVR变换器、滤波器、旁路开关、串联变压器、变换器A、电感L和飞轮储能阵列(FESA)组成。
DVR变换器、滤波器、旁路开关和串联变压器一起组成串联型电压恢复器,变换器A和电感L构成PWM整流器,飞轮储能阵列由多台飞轮储能单元(FESU)并联组成,飞轮储能单元由飞轮变换器、永磁无刷直流电机和飞轮3部分组成。电网电压正常时,飞轮处于充电状态:在电网电压发生暂降时,DVR变换器经串联变压器向电网注入补偿电压,从而保证负载电压是额定电压。浅度电压暂降时能量由电网提供;深度电压暂降时能量由飞轮提供。
驱动电机采用三相永磁无刷直流电机,因其具有运行可靠、免维护、高效率以及调速性能好的特点,其主要参数如表l所示。

2 系统的控制策略
2.1飞轮充电控制
飞轮的充电控制采用双环控制结构,外环是转速环,内环是电流环。其中,速度调节器采用复合控制。在启动阶段,希望转速快速上升,而对控制精度要求相对较低,采用恒转矩限流启动;在调速阶段,采用恒功率充电模式,随着转速的升高,输入电流反比减小,可以减小不平衡磁拉力对转子稳定性的影响,恒功率充电以系统能承受的最大功率P*为加速度功率;当速度达到稳态时,希望有较高的稳态精度,采用PI控制。
2.2 飞轮放电控制
在飞轮放电过程中,电机运行于制动状态,随着转速的降低,电压也随之降低。为了得到恒定的直流母线电压,采用电机回馈制动的半桥调制方式。
各台并联飞轮属于同一规格,电气参数基本一致;前后两次电压暂降间隔足以让所有飞轮转速都上升到额定转速,故功率和储能量相等;为了减少系统损耗,每次放电时投入运行的飞轮个数应尽可能少。飞轮放电控制的关键点是如何计算放电的飞轮台数以及每台飞轮的输出电流指令值。
各台飞轮的充放电次数为:T1≥T2≥…,≥TN,则放电控制策略如下:
1)按照充放电次数由少到多依次给各台飞轮排序,如充放电次数相同,则转速高者序列号小。
2)根据式(1)确定进入放电状态的飞轮台数m。

式中,Pmaxi为i台飞轮的最大输出功率;P*是需要输出的功率指令值。
3)当P*<Pmax1,FESU1进入放电状态,其输出电流指令值为:
,其中E1为BLDCM1的反电动势;当P*>Pmax1,输出功率指令值超出任意一台飞轮储能单元的最大输出功率。因此,需多台飞轮进入放电状态,FESU1至FESUm-1的输出电流指令值为:,FESUm的输出电流指令值为。随着能量的释放,飞轮转速下降,故储能量和输出功率随之减小,当原有投入放电的飞轮不能满足负载需求时,投入放电的飞轮台数以及各台飞轮的输出电流指令值需重新计算。
将之前进入放电状态的飞轮的序列号都增加1,然后返回1)重新计算。当电网电压恢复正常时,投入放电状态的飞轮的充放电次数都增加1。由上述分析可得飞轮放电的控制框图如图2所示。
2.3 DVR变换器的控制
补偿电压的输出需同时实现两个目标:高动态响应速度和高稳定精度。前馈控制可以显著提高系统的动态响应速度,缩短补偿电压发出的时间。反馈控制可以提高系统的稳定裕度。因此,采用由前馈控制、电压瞬时值和滤波电容电流瞬时值反馈控制构成的复合控制策略。
电压 电容 仿真 电路 滤波器 变压器 电感 PWM 电流 电阻 相关文章:
- 用于电压或电流调节的新调节器架构(07-19)
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 电源设计小贴士 3:阻尼输入滤波器(第一部分)(01-16)
- 高效地驱动LED(04-23)