移相全桥DC/DC变换器双闭环控制系统设计
时间:08-19
来源:互联网
点击:
随着我国电源行业的发展,在中大功率应用场合,采用PWM控制技术的移相全桥DC/DC变换器越来越受到人们的关注,随着PWM控制技术逐渐向高频化方向发展,全球各大集成电路生产商竞相研制出各种新型的PWM控制器件,其中TI公司推出的UCC3895是一款具有代表性的移相全桥控制器件。该器件既可以工作于电流模式也可以工作于电压模式,又可以为谐振零电压开关提供高频、高效的解决方案,具有广阔的应用前景。这里基于UCC3895设计了移相全桥DC/DC变换器的双闭环控制系统,并结合实际应用对该系统进行了实验测试。
1 移相全桥DC/DC变换器闭环系统工作原理
移相全桥DC/DC变换器闭环系统结构框图如图1所示。
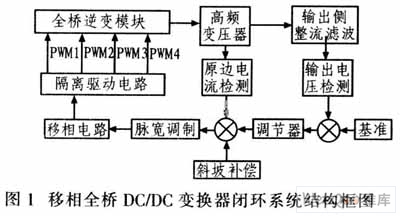
直流输入电压经过全桥逆变、高频变压器降压、输出侧整流滤波得到所需的直流电压。四路PWM波配置为两组,PWMl、PWM2为一组,用来控制全桥逆变模块的超前臂;PWM3、PWM4为另一组,控制滞后臂。PWMl与PWM2互补,PWM3与PWM4互补,可通过UCC3895设置合适的死区时间。该闭环控制电路采用峰值电流模式,外环电压调节器的输出作为电流内环的基准,在电流环中对采样的电流进行斜坡补偿,以保证占空比大于50%的时候,系统仍能稳定工作。电流环的输出作为调制信号,通过脉宽调制电路、移相电路、隔离驱动电路实现对系统的闭环控制。
2 闭环控制电路设计
2.1 控制模式
闭环系统采用恒定导通时刻峰值电流控制方式,可以实现逐个脉冲控制,动态响应速度快,稳定性好,并且易于实现限流及过流保护。工作原理框图如图2所示。
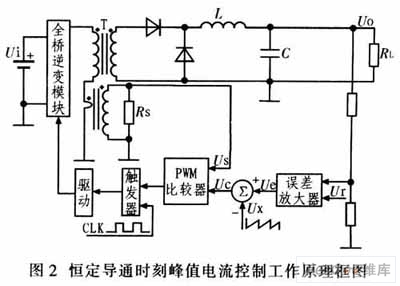
外环误差放大器输出的误差放大电压Ue与外加的补偿锯齿波Ux合成倒锯齿波Uc作为内环PWM比较器的基准,当开关管电流检测信号Us的峰值达到Uc时,触发器翻转,开关管关断,从而减小输出电流翻。
2.2 硬件电路设计
控制部分硬件电路如图3所示。电压外环误差放大器采用新型光隔离误差放大器FOD2741,将UCC3895的引脚l(EAN)和引脚2(EAOUT)连接在一起,使内部的误差放大器构成电压跟随器,跟踪PI调节器输出的误差电压,并将其输入至内部PWM比较器的同相输入端,作为电流环的基准。
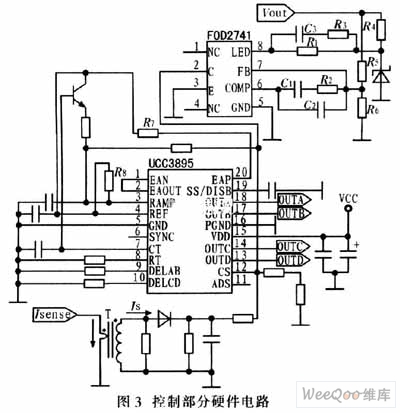
图3中,通过R5和R6设置输出取样电压,R5、R6与输出电压Vout满足:
R1和R7控制光耦的增益,C1、C2、C3和R1、R2、R3与FOD2741组成双零点、双极点的PI补偿网络。
在电流内环中加入斜坡补偿以保证系统的稳定性。斜坡补偿信号以电压跟随的形式,从RC振荡器中引入,其中加入上拉电阻R8为补偿的锯齿波提供直流偏压,解决启动或轻载时UCC3895输出波形的不对称问题。图中电流检测信号Is经过I-V变换电路转换成电压信号。根据叠加原理与引入的斜坡补偿信号叠加送入UCC3895的引脚3(RAMP),作为内部PWM比较器的反相输入。通过内部限流比较器及过流比较器实现逐周期限流及过流保护,当2 V2.5 V时,进入过流保护模式。
3 实验结果
将该控制系统应用于一台1.5 kW的电源中,设计参数如下:输入电压为直流144 V,输出14 V直流电压,高频变压器原、副边匝数比为15:2,开关频率为50 kHz,输出滤波电感为22μH,滤波电容为2 820μF,负载为0.14 Ω。补偿网络参数为:R1=l kΩ、R2=68 Ω、R3=40 Ω、C1=1.2 nF、C2=47 pF、C3=82 nF。在移相控制占空比的过程中,全桥逆变器的驱动波形及高频变压器副边的输出波形如图4所示。

4 结束语
本文基于UCC3895设计了移相全桥DC/DC变换器双闭环控制系统,其中加入补偿校正环节,使系统在交越频率处的相位裕度大于45°,从而达到稳定状态。结合实际应用对该系统进行实验测试,结果表明,系统动态响应快,稳定性好。
1 移相全桥DC/DC变换器闭环系统工作原理
移相全桥DC/DC变换器闭环系统结构框图如图1所示。
直流输入电压经过全桥逆变、高频变压器降压、输出侧整流滤波得到所需的直流电压。四路PWM波配置为两组,PWMl、PWM2为一组,用来控制全桥逆变模块的超前臂;PWM3、PWM4为另一组,控制滞后臂。PWMl与PWM2互补,PWM3与PWM4互补,可通过UCC3895设置合适的死区时间。该闭环控制电路采用峰值电流模式,外环电压调节器的输出作为电流内环的基准,在电流环中对采样的电流进行斜坡补偿,以保证占空比大于50%的时候,系统仍能稳定工作。电流环的输出作为调制信号,通过脉宽调制电路、移相电路、隔离驱动电路实现对系统的闭环控制。
2 闭环控制电路设计
2.1 控制模式
闭环系统采用恒定导通时刻峰值电流控制方式,可以实现逐个脉冲控制,动态响应速度快,稳定性好,并且易于实现限流及过流保护。工作原理框图如图2所示。
外环误差放大器输出的误差放大电压Ue与外加的补偿锯齿波Ux合成倒锯齿波Uc作为内环PWM比较器的基准,当开关管电流检测信号Us的峰值达到Uc时,触发器翻转,开关管关断,从而减小输出电流翻。
2.2 硬件电路设计
控制部分硬件电路如图3所示。电压外环误差放大器采用新型光隔离误差放大器FOD2741,将UCC3895的引脚l(EAN)和引脚2(EAOUT)连接在一起,使内部的误差放大器构成电压跟随器,跟踪PI调节器输出的误差电压,并将其输入至内部PWM比较器的同相输入端,作为电流环的基准。
图3中,通过R5和R6设置输出取样电压,R5、R6与输出电压Vout满足:
R1和R7控制光耦的增益,C1、C2、C3和R1、R2、R3与FOD2741组成双零点、双极点的PI补偿网络。
在电流内环中加入斜坡补偿以保证系统的稳定性。斜坡补偿信号以电压跟随的形式,从RC振荡器中引入,其中加入上拉电阻R8为补偿的锯齿波提供直流偏压,解决启动或轻载时UCC3895输出波形的不对称问题。图中电流检测信号Is经过I-V变换电路转换成电压信号。根据叠加原理与引入的斜坡补偿信号叠加送入UCC3895的引脚3(RAMP),作为内部PWM比较器的反相输入。通过内部限流比较器及过流比较器实现逐周期限流及过流保护,当2 V2.5 V时,进入过流保护模式。
3 实验结果
将该控制系统应用于一台1.5 kW的电源中,设计参数如下:输入电压为直流144 V,输出14 V直流电压,高频变压器原、副边匝数比为15:2,开关频率为50 kHz,输出滤波电感为22μH,滤波电容为2 820μF,负载为0.14 Ω。补偿网络参数为:R1=l kΩ、R2=68 Ω、R3=40 Ω、C1=1.2 nF、C2=47 pF、C3=82 nF。在移相控制占空比的过程中,全桥逆变器的驱动波形及高频变压器副边的输出波形如图4所示。
4 结束语
本文基于UCC3895设计了移相全桥DC/DC变换器双闭环控制系统,其中加入补偿校正环节,使系统在交越频率处的相位裕度大于45°,从而达到稳定状态。结合实际应用对该系统进行实验测试,结果表明,系统动态响应快,稳定性好。
PWM 集成电路 电流 电压 变压器 电路 放大器 比较器 振荡器 电阻 电感 电容 逆变器 相关文章:
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 高效地驱动LED(04-23)
- 用于低成本高效率离线LED驱动器的初级端调节技术(05-14)
- 隔离式MOSFET驱动器集成电路的功率效率在轻负载时得到改善(07-31)
- DC-DC变换器中一种高性能振荡电路的设计(04-08)