基于电位器或DAC实现的可变频高斜率滤波器
模拟可变频滤波器要求使用可变无源器件。滤波器斜率越大,所需的可变无源器件就越多。这些元件很多时候是电位器。例如具有18dB/8倍频斜率的低通巴特沃斯滤波器需要使用一个三组电位器。如果我们同时需要重新调谐低通和高通滤波器,那么必要的电位器电阻抽头数量将翻倍。
当我们需要同时重新调谐多个相同的滤波器时也是这样。这些多组电位器非常昂贵,而且很难找到。另外一个问题是它们的群误差,在实际使用中大约有3dB的误差。这些电位器的体积通常也很大。另外,电位器磨损会产生"杂音(zipper)"噪声。
实现这些滤波器的另外一种方法是使用有源元件代替可变无源元件。最合适的元件是压控放大器--VCA。VCA电路的变量是增益,它会根据外部控制电压发生变化。
VCA单元最常见的是被设计成电流入/电流出器件,并且在电压敏感控制端口呈指数响应。
VCA单元的增益是:
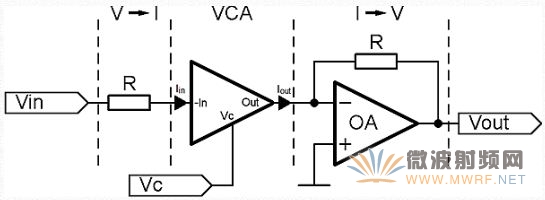
图1:典型的VGA电路
输入电压Vin通过电阻R转换成输入电流Iin.VC是调制增益的控制电压。VCA控制增益的过程是:将输入电流信号转换成双极性对数电压,再与直流控制电压VC相加,然后将加起来的和电压通过反对数电路重新转换回电流。VCA输出电流Iout通过基于运放的I-V转换成电压Vout,如图1所示,其中的转换比取决于输出和反相输入之间连接的反馈电阻。经过VCA和输出运放的信号路径是同相的,因为VCA是反相的。如果VC引脚接到地,那么输出电流将等于输入电流。
如果用分贝刻度(图2),控制电压和增益之间的关系就是线性的:
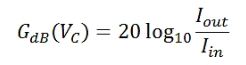
每家VCA制造商提供的响应刻度是不一样的。例如,SSM2164是-33mV/dB,SSM2018是-30mV/dB,THAT2180是±6,1mV/dB。
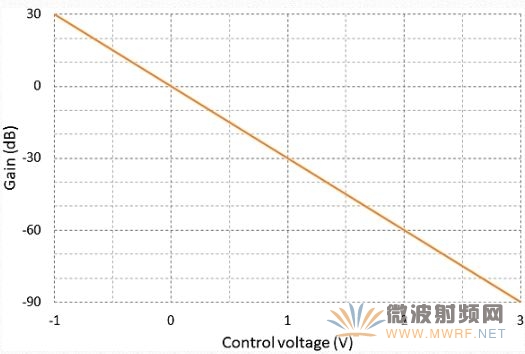
图2:SSM2164的增益与控制电压关系
让我们从一阶低通滤波器例子开始吧:
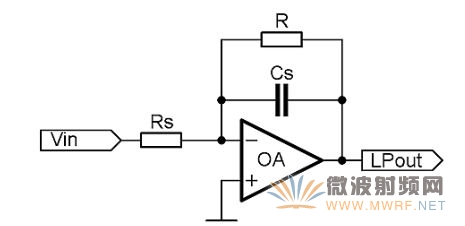
图3:基于运放的单极点低通滤波器
该滤波器的截止频率是:
这种滤波器的截止频率很多时候是因为调整了电阻RS而改变的。如果前面的电路中使用压控放大器,滤波器原理图将变成如下所示:
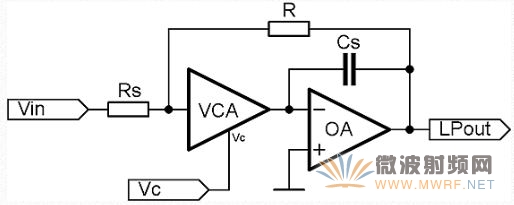
图4:基于VCA的单极点低通滤波器
这是典型的一阶低通滤波器,但截止频率取决于VCA增益。如果增益是1,VCA的行为如同短路一样,截止频率仅取决于Rs和Cs值。如果增益大于1,VCA相当于一个负电阻(截止频率提高)。如果增益小于1,VCA相当于一个电阻(截止频率下降)。
在使用VCA后,滤波器的截止频率等于:
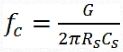
,其中G代表VCA增益。
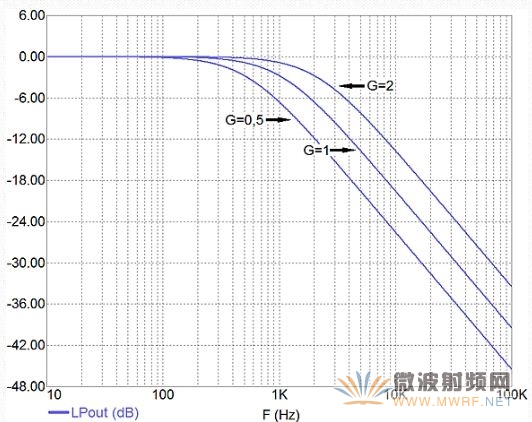
图5:图4中的滤波器的频率响应
如果我们想用VCA同时控制低通和高通滤波器,最好是使用状态变量滤波器(图6)。状态变量滤波器由积分器(OA2)与和/差放大器(OA1)组成。来自所有级电路的信号都用于反馈。这些滤波器具有较低的元件值敏感性,设计很简单。
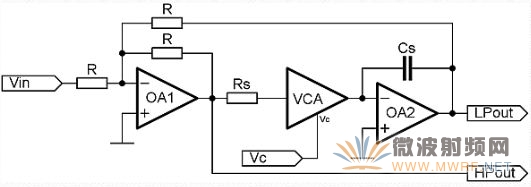
图6:基于VCA的单极点状态变量滤波器
当VC为0时,截止频率由电路RSCS对决定。当VC增加时,截止频率随取决于VCA增益常数的斜率而下降。
如果单位为dB的VCA增益是非零值,那么转移的角频率fC2是:
针对已知的增益控制常数GC,转移频率是:
其中VC代表VCA控制电压。
举例来说,如果VCA具有-50mV/dB的增益控制常数,VC等于1V,那么截止频率将是RSCS对的截止频率的1/10。
下面这个公式表达了将截止频率从fC变更为目标值fC2所需的控制电压,其中fC由RS和CS确定。
从上面的公式可以看出,VC以指数响应特性控制截止频率。
对于大斜率的滤波器来说,我们必须增加滤波器的阶数。图7显示了由一个电位器或数字/模拟转换器控制的双通道四阶林奎茨-瑞利状态变量滤波器。在一个通道中,有4个积分器加上和/差级电路,并且来自所有4个积分器的反馈都返回和/差级电路。IC3用作缓冲器,驱动所有8个VCA的控制端口。来自电位器或DAC的电压被施加到反相输入端。这个电压随即被IC3的增益所衰减或放大,而IC3的增益由电阻R13和R14决定。
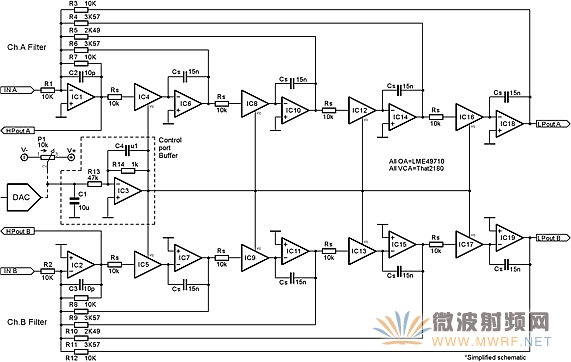
图7:双通道大斜率可变频率滤波器
图8显示了图7所示滤波器的频率响应,图中同样绘出了低通输出和高通输出。中心增益是0dB,角频率被RS和CS设置为接近1kHz.如果增益翻倍,截止频率也将翻倍(约2kHz)。同样,如果增益减半,截止频率也将减半(约500Hz)。
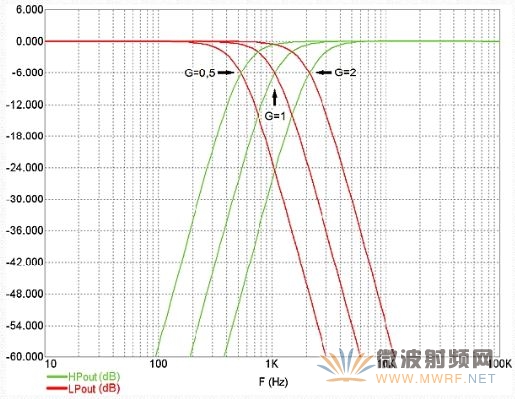
图8:四阶可变LR滤波器在三种不同VCA增益下的频率响应
因为在最终设计中使用了精密的E192电阻以及匹配的电容和高速运放,测量得到的特征数据非常精确。
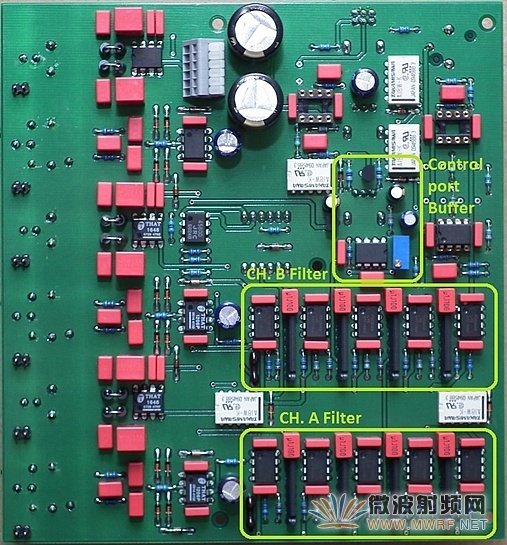
图9:作为更加复杂系统一部分的VCA受控滤波器
- 可以连续改变截止频率的电压控制通用滤波器(05-26)
- 用Multisim分析二阶低通滤波器电路(09-08)
- 选择RF和微波滤波器的八大窍门(04-28)
- 滤波器功率最大而灵敏度却最低(11-14)
- 微波滤波器的实现(11-02)
- 网络综合法得到的低通原型滤波器(03-10)