永磁同步伺服电机(PMSM)驱动器原理
时间:10-26
来源:互联网
点击:
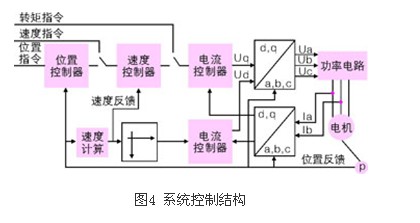
从a,b,c坐标系转换到d,q坐标系有克拉克(clarke)和帕克(park)变换来是实现;从d,q坐标系转换到a,b,c坐标系是有克拉克和帕克的逆变换来是实现的。
结语
本文简单的介绍了伺服驱动器的几个主要的功能模块的实现及原理,谨帮助大家对伺服驱动器有进一步了解之用,大家如果想更深入的了解伺服驱动器的设计原理,请参考其它的文献。
电力电子 电子 电动机 机器人 电流 电路 电压 开关电源 逆变器 集成电路 总线 收发器 相关文章:
- 基于DSP高精度伺服位置环设计(06-21)
- 基于DSP的工业缝纫机控制系统设计(09-23)
- LED日光灯设计方案(12-22)
- 用FPGA平台实现工业电机最大效率(12-24)
- 2 kW有源功率因数校正电路设计(03-12)
- 低压配电系统中的静止无功发生器设计(03-26)