PC机与变频器的串行通信
时间:10-24
来源:互联网
点击:
变频器的监控系统设计
硬件连接框图
本文设计的监控系统采用平衡发送和差分接收方式实现通信。由于传输线通常使用双绞线,又是差分传输,所以有极强的抗共模干扰的能力。rs-485最大的通信距离可达1219m,rs-485最大传输速率为10mb/s。rs-485采用半双工工作方式,支持多点数据通信。总线网络拓扑一般采用终端匹配的总线型结构。
rs-485总线一般最大支持32个节点。
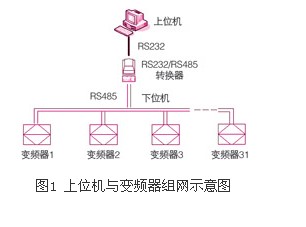
本设计采用带有rs-485接口的日普变频器(rp3200)控制电机运转,上位计算机和变频器进行通讯,计算机通过读写变频器的参数来监控变频器的运行状态。上位机为主控计算机,下位机为被控变频器(最多为31个)。主控和被控之间的串行控制信号始终是主控启动传送,被控对此作出响应。某一个时刻,主控和一个被控进行信号传送,所以要预先给每个被控分配地址号,并由主控指定地址执行发送。被控接收到主控来的信号后执行其功能,并返回应答给主控。由于计算机本身支持rs-232串行通信方式,所以需要用rs-232与rs-485转换器将计算机与变频器连接起来。上位机与变频器控制组网结构如图1所示。
此变频器控制命令和方式有三种:数字面板控制、端子控制和rs-485通讯控制,变频器的默认出厂设置为变频器控制面板控制,这不符合我们与pc
机通讯的要求,为了能使变频器与 pc机之间通讯,我们对变频器作如下设置:
操作方式选择
在数字面板中选择参数设定,将运行方式按表1设置为rs-485运行方式。

通信参数设定
通信地址设定:定义设备地址 1 – 31,在线不允许两个设备占用一个地址
传送中断检测时间:设定 范围为:0-60sec
通信规格设定:
接口:rs-485 同步方式:异步
传输参数:
波特率:可从 1200,2400,4800,9600,19200 等中选择
停止位:固定为 1位
变频器通信命令介绍
通信数字元格式
数字元格式如图2所示。
纠错方法
在信息后加checksum, checksum等于所有字节(hex)之和的最后一字节,转换为ascii码。
数据包格式
类似modbus ascii格式,格式如下。
header akp1p0 d3d2d1d0 s delimiter
格式解析:
【header】:3ah
【delimiter】:0dh,0ah
a、k、p1p0、d3d2、d1d0、s分别为单字节十六进制数,转换为ascii码。
【a】:从机(变频器)地址。变频器地址范围为(1-31),a必须存在。
注:地址a=00h时对所有从机有效,且所有从机不回送响应信息。故a=00h只能发送运行命令操作。
【k】:数据包功能代码。
【p1p0】:参数序号。参数标号,两字节十六进制数。
【d3d2d1d0】:参数值:去掉小数点的参数值,共四字节的十六进制数,先发高位,后发低位。
【s】:和校验字。s是上面所有字节十六进制之和(a+k+p1p0+d3+d2+d1+d0)取最后一字节(bit7-bit0)值,转换为ascii码。
其中k、p、d3d2d1d0参数定义如表3所示。
通信主程序的设计架构
设计通信主程序的主要功能是:实现计算机对变频器的运行控制和状态监视,即构成一个闭环监控系统。程序设计架构如图3示。
1#变频器在运行状态下改变它的“设定频率”为35.00hz
方法如下:
35.00去掉小数为3500d=0dach
a=1=01h (变频器地址为“01h”)
k=04h (运行参数设定为“04h”)
p1p0=0001h (运行时设定频率为“0001h”)
d3=00h (数据高字节为“00h”)
d2=00h (数据次高字节为“00h”)
d1=0dh (数据次字节为“0dh”)
d0=ach (数据低字节为“ach”)
s=c9h (和校验字节为“c9h”)
(s=0bh+04h+00h+01h+00h+00h+00h+0dh+ach=c9h)
主机先后依次发送字节如下的数据包ascii:
3ah,30h,42h,30h,34h,30h,30h,30h,31h,30h,30h,30h,30h,30h,44h,41h,43h,43h,39h,0dh,0ah
变频器回复主机相同数据。
部分通信代码如下:
打开通讯端口代码
char *comno;
dcb dcb;
string temp;
temp=“com”+inttostr(rdcom-》itemindex+1);
comno=temp.c_str() ;
hcomm=createfile(comno,generic_
read|generic_write,0,null,open_existing,0,0);
if(hcomm==invalid_handle_value)
{
statusbar1-》simpletext=“打开通信端口错误!”;
return;
}
else
statusbar1-》simpletext=“端口已打开!”;
sleep(100);
getcommstate(hcomm,&dcb);
dcb.baudrate=cbr_9600;
dcb.bytesize =8;
dcb.parity =noparity;
dcb.stopbits =onestopbit;
setcommstate(hcomm,&dcb);
if(!setcommstate(hcomm,&dcb))
{
statusbar1-》simpletext=“通信端口设置错误!”;
closehandle(hcomm);
return;
}
发送数据代码
int i=0;
unsigned char sends[21];
unsigned long lrc,bs;
sends[0]=3ah; //header
sends[1]=30h; //a
sends[2]=31h;
sends[3]=30h;//k
sends[4]=34h;
sends[5]=30h; //p1
sends[6]=30h;
sends[7]=30h; //p0
sends[8]=31h;
sends[9]=30h; //d3
sends[10]=30h;
sends[11]=30h;//d2
sends[12]=30h;
sends[13]=30h; //d1
sends[14]=44h;
sends[15]=41h; //d0
sends[16]=43h;
sends[17]=43h; //s
sends[18]=39h;
sends[19]=0dh; //delimiter
sends[20]=0ah;
for(i=0;i++;i《21)
{
if(hcomm==0)
return;
writefile(hcomm,sends,1,&lrc,null);
}
接收数据代码
int ln;
unsigned long lrc,bs;
char inbuff[1024];
dword nbytesread,dwevent,dwerror;
comstat cs;
if(hcomm==0)
{
mreceive-》text=“读取过程有问题,已跳出!”;
return;
}
if(hcomm==invalid_handle_value)
{
mreceive-》text=“读取过程有问题,已跳出!”;
return;
}
clearcommerror(hcomm,&dwerror,&cs);
if(cs.cbinque)
{
readfile(hcomm,inbuff,cs.cbinque,&nbytesread,null);
inbuff[cs.cbinque]=`\0`;
mreceive-》text=inbuff;
interceptrece(mreceive-》text);
}
else
mreceive-》text=“未读取到数据!”;
以上代码在winxp sp2操作系统, c++builder6 编程环境下调试编译通过。
硬件连接框图
本文设计的监控系统采用平衡发送和差分接收方式实现通信。由于传输线通常使用双绞线,又是差分传输,所以有极强的抗共模干扰的能力。rs-485最大的通信距离可达1219m,rs-485最大传输速率为10mb/s。rs-485采用半双工工作方式,支持多点数据通信。总线网络拓扑一般采用终端匹配的总线型结构。
rs-485总线一般最大支持32个节点。
本设计采用带有rs-485接口的日普变频器(rp3200)控制电机运转,上位计算机和变频器进行通讯,计算机通过读写变频器的参数来监控变频器的运行状态。上位机为主控计算机,下位机为被控变频器(最多为31个)。主控和被控之间的串行控制信号始终是主控启动传送,被控对此作出响应。某一个时刻,主控和一个被控进行信号传送,所以要预先给每个被控分配地址号,并由主控指定地址执行发送。被控接收到主控来的信号后执行其功能,并返回应答给主控。由于计算机本身支持rs-232串行通信方式,所以需要用rs-232与rs-485转换器将计算机与变频器连接起来。上位机与变频器控制组网结构如图1所示。
此变频器控制命令和方式有三种:数字面板控制、端子控制和rs-485通讯控制,变频器的默认出厂设置为变频器控制面板控制,这不符合我们与pc
机通讯的要求,为了能使变频器与 pc机之间通讯,我们对变频器作如下设置:
操作方式选择
在数字面板中选择参数设定,将运行方式按表1设置为rs-485运行方式。
通信参数设定
通信地址设定:定义设备地址 1 – 31,在线不允许两个设备占用一个地址
传送中断检测时间:设定 范围为:0-60sec
通信规格设定:
接口:rs-485 同步方式:异步
传输参数:
波特率:可从 1200,2400,4800,9600,19200 等中选择
停止位:固定为 1位
变频器通信命令介绍
通信数字元格式
数字元格式如图2所示。

纠错方法
在信息后加checksum, checksum等于所有字节(hex)之和的最后一字节,转换为ascii码。
数据包格式
类似modbus ascii格式,格式如下。
header akp1p0 d3d2d1d0 s delimiter
格式解析:
【header】:3ah
【delimiter】:0dh,0ah
a、k、p1p0、d3d2、d1d0、s分别为单字节十六进制数,转换为ascii码。
【a】:从机(变频器)地址。变频器地址范围为(1-31),a必须存在。
注:地址a=00h时对所有从机有效,且所有从机不回送响应信息。故a=00h只能发送运行命令操作。
【k】:数据包功能代码。
【p1p0】:参数序号。参数标号,两字节十六进制数。
【d3d2d1d0】:参数值:去掉小数点的参数值,共四字节的十六进制数,先发高位,后发低位。
【s】:和校验字。s是上面所有字节十六进制之和(a+k+p1p0+d3+d2+d1+d0)取最后一字节(bit7-bit0)值,转换为ascii码。
其中k、p、d3d2d1d0参数定义如表3所示。

通信主程序的设计架构
设计通信主程序的主要功能是:实现计算机对变频器的运行控制和状态监视,即构成一个闭环监控系统。程序设计架构如图3示。

1#变频器在运行状态下改变它的“设定频率”为35.00hz
方法如下:
35.00去掉小数为3500d=0dach
a=1=01h (变频器地址为“01h”)
k=04h (运行参数设定为“04h”)
p1p0=0001h (运行时设定频率为“0001h”)
d3=00h (数据高字节为“00h”)
d2=00h (数据次高字节为“00h”)
d1=0dh (数据次字节为“0dh”)
d0=ach (数据低字节为“ach”)
s=c9h (和校验字节为“c9h”)
(s=0bh+04h+00h+01h+00h+00h+00h+0dh+ach=c9h)
主机先后依次发送字节如下的数据包ascii:
3ah,30h,42h,30h,34h,30h,30h,30h,31h,30h,30h,30h,30h,30h,44h,41h,43h,43h,39h,0dh,0ah
变频器回复主机相同数据。
部分通信代码如下:
打开通讯端口代码
char *comno;
dcb dcb;
string temp;
temp=“com”+inttostr(rdcom-》itemindex+1);
comno=temp.c_str() ;
hcomm=createfile(comno,generic_
read|generic_write,0,null,open_existing,0,0);
if(hcomm==invalid_handle_value)
{
statusbar1-》simpletext=“打开通信端口错误!”;
return;
}
else
statusbar1-》simpletext=“端口已打开!”;
sleep(100);
getcommstate(hcomm,&dcb);
dcb.baudrate=cbr_9600;
dcb.bytesize =8;
dcb.parity =noparity;
dcb.stopbits =onestopbit;
setcommstate(hcomm,&dcb);
if(!setcommstate(hcomm,&dcb))
{
statusbar1-》simpletext=“通信端口设置错误!”;
closehandle(hcomm);
return;
}
发送数据代码
int i=0;
unsigned char sends[21];
unsigned long lrc,bs;
sends[0]=3ah; //header
sends[1]=30h; //a
sends[2]=31h;
sends[3]=30h;//k
sends[4]=34h;
sends[5]=30h; //p1
sends[6]=30h;
sends[7]=30h; //p0
sends[8]=31h;
sends[9]=30h; //d3
sends[10]=30h;
sends[11]=30h;//d2
sends[12]=30h;
sends[13]=30h; //d1
sends[14]=44h;
sends[15]=41h; //d0
sends[16]=43h;
sends[17]=43h; //s
sends[18]=39h;
sends[19]=0dh; //delimiter
sends[20]=0ah;
for(i=0;i++;i《21)
{
if(hcomm==0)
return;
writefile(hcomm,sends,1,&lrc,null);
}
接收数据代码
int ln;
unsigned long lrc,bs;
char inbuff[1024];
dword nbytesread,dwevent,dwerror;
comstat cs;
if(hcomm==0)
{
mreceive-》text=“读取过程有问题,已跳出!”;
return;
}
if(hcomm==invalid_handle_value)
{
mreceive-》text=“读取过程有问题,已跳出!”;
return;
}
clearcommerror(hcomm,&dwerror,&cs);
if(cs.cbinque)
{
readfile(hcomm,inbuff,cs.cbinque,&nbytesread,null);
inbuff[cs.cbinque]=`\0`;
mreceive-》text=inbuff;
interceptrece(mreceive-》text);
}
else
mreceive-》text=“未读取到数据!”;
以上代码在winxp sp2操作系统, c++builder6 编程环境下调试编译通过。
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 基于FPGA安全封装的身份认证模型研究(05-27)
- 高精度压力测控系统的试验研究(04-08)