电子压力控制器PID算法的研究
时间:12-20
来源:互联网
点击:
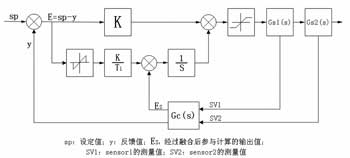
图3 PI控制算法结构图
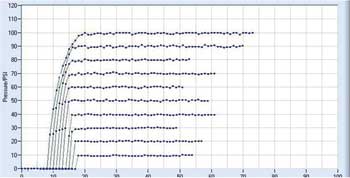
图4 控制器在不同压力设定值下的响应曲线
值得注意的是,为了提高控制的响应速度,最好给积分赋予一个不为零的初始值。由于进气和排气的速度不同,所以最好给与进气和排气不同的初始值,以提高快速性和准确性。
系统中加入积分校正后,会产生饱和效应,超调量可能过大,因此引入了积分分离式算法。为了减少积分校正对控制系统动态性能的影响,需要在控制开始阶段或是大幅值变化时,取消积分校正;而当实际压力值与设定值的误差小于一定值时,恢复积分校正作用,以消除稳态误差。积分分离式算法可以保持积分的作用,同时减小超调量,改善控制系统的性能。
控制算法的方框图如图3所示。
图4是控制器在不同压力设定值下的响应曲线。因为系统漏气或者用户使用气压的缘故,伴随设定值的增加,压力波动值增大,达到稳态的时间会变长。
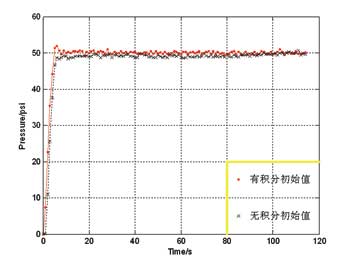
图5 有无积分初始值时响应曲线的对比
图5是有无积分初始值时响应曲线的对比。此图中,采样时间为1s,采样点数115个。从图可得,有积分初始值的响应进入稳态的时间明显短于无积分初始值。
5 PWM控制
PI运算的结果被用于产生PWM信号。利用英飞凌捕捉/比较单元(CAPCOM1/2)产生PWM信号,在定时寄存器产生的溢出中断里调用PI算法,从而得到比较寄存器的数值。
PWM的执行周期要给与合适的选择。周期太短,也许会导致阀门的频繁开关,会缩短阀门使用寿命,同时可能造成对阀门的过度控制;周期太长,也就无法做到对气压的及时调节,无法掌握控制精度。程序中PWM的周期为10ms(阀门导通时间仅为3.4ms)。
6 结语
电子压力控制器基于双传感器负反馈,采用带死区的积分分离式PI控制算法,解决了压力控制的快速性和稳定性问题。该系统结构简单、工作可靠,实现了对气压的精密控制。
单片机 电子 传感器 压力传感器 ADC 电压 电源模块 放大器 电路 LCD PWM 相关文章:
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 家居安防无线监控报警系统(04-02)
- 高精度压力测控系统的试验研究(04-08)
- 提高实时系统数据采集质量的研究(04-09)
- 基于MSP430的低功耗便携式测温仪设计(06-18)
- 以超低功耗微处理器MSP430为核心的热计量表设计(06-18)