基于自动调焦显微视觉的MEMS运动测量技术
时间:12-14
来源:互联网
点击:
2.2 平面运动位移算法
为了从MEMS器件视觉图像中估计平面刚体运动,需要利用一定的数字图像处理技术来提取其运动位移。在实际应用中,整像素的位移是很容易获得的。但是实际的位移值一般不恰好为整像素,为提高数字图像相关方法的测量精度,在本系统中,使用数字图像相关求出像素级的位移再对其所得的相关系数进行二次曲面拟合的方法求取亚像素位移,具有抗噪能力强、计算量小、精度高等优点。
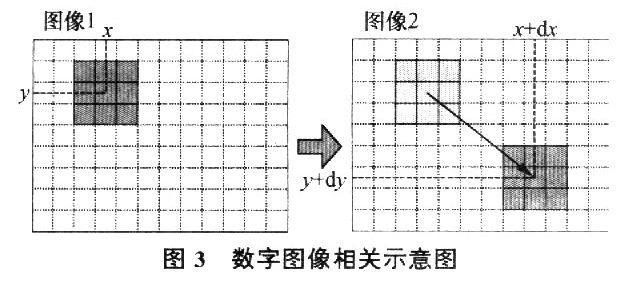
数字图像相关是对运动序列图像做相关求运动位移的方法。如图3所示,在图像1中选取(MN)大小的模板A,在图像2上模板位置(x,y)周围设定的计算窗口中移动,并按一定的相关函数与模板所覆盖的区域计算相关系数,寻找与模板匹配后相关系数值最大的位置。在这里选用效果较好的标准化协方差相关函数,
其取值范围为[-1,1]。其中:A(m,n)、B(m+i,n+j)分别为图像1中选取的模板的灰度分布和图像2上被移动的模板所覆盖到的区域的灰度分布,A、B为其平均灰度值。计算后在图像2上找到相关系数R最大的位置(x+dx,y+dy),所得的dx、dy即为像素级的运动位移。
对数字图像相关获取的像素级位移再通过相关系数曲面拟合的方法来求取亚像素位移。本文采用如下的二元二次多项式来拟合相关函数曲面。对像素级位移搜索到的位置(x+dx,y+dy)及其周围相邻的8个点用下面的二元二次函数来表示:
这里共有ao,…,a5 6个待定系数,而33的拟合窗口有9个方程,因此可以使用最小二乘法来求解。函数f(x,y)在拟合曲面的极值点应满足以下方程组:
2.3 自动调焦
对MEMS器件进行离面运动测试时,需要在每个“冻结”的运动位置上采用自动调焦技术来获取准确的焦平面位置以确定其相对运动位移。系统采用基于数字图像处理的方法进行自动调焦,对采集到的图像做去噪滤波的预处理,确定一个合理可靠的评价函数,根据该评价函数判断试样是否对焦,并判断离焦方向,向机电
驱动系统发送调焦信号,带动被测MEMS器件运动,达到自动调焦的目的。
基于数字图像处理方法的自动调焦最重要的就是寻找调焦评价函数,该判据应该具有无偏性、单峰性,且最好能反应离焦极性、信噪比等特性。在本系统中,为了提高运算速度,在图像内选取一块矩形区域(ROI,region ofinterest),检测其边缘的清晰度,计算它的梯度判别函数G(ROI)。计算表达式如下:
其中:S(i,j)为选取区域的光强值矩阵,M、N为矩阵的行和列。求解G(ROI)是对选取区域计算x和y向梯度,并对其平方相加,这相当于增加了高频分量的权重。
为兼顾调焦范围、调焦准确性和调焦速度的要求,本系统采用粗精结合的调焦策略。先用步进电机进行快速、粗略的焦平面位置搜索,并在搜索到的最佳点附近使用精密工作台的小步距z向移动进行高精度的定位,实现自动调焦的目的。
3 系统验证实验
3.1 平面运动测量验证
本实验通过测量装夹在高精度压电工作台上的微加速度计的微小移动来验证平面内位移算法的精度。CCD摄像机选用Sony公司的XC-ST50,像素数为768x 494,每个像素的大小8.4 μm9.8 μm,信噪比60 dB;图像采集卡选用NI公司的PCI-1409,10位灰度量化;显微镜物镜的放大倍数为25倍;此时CCD上每个像素对应于视场中336 nm392 nm大小的区域。三维压电工作台选用德国PI公司的P517.3CL,其x、y向的位移分辨率为1 nm,全程重复定位精度为5 nm,行程为100 μm100μm;由工作台定位引起的误差小于0.015个像素。图4为为验结果。
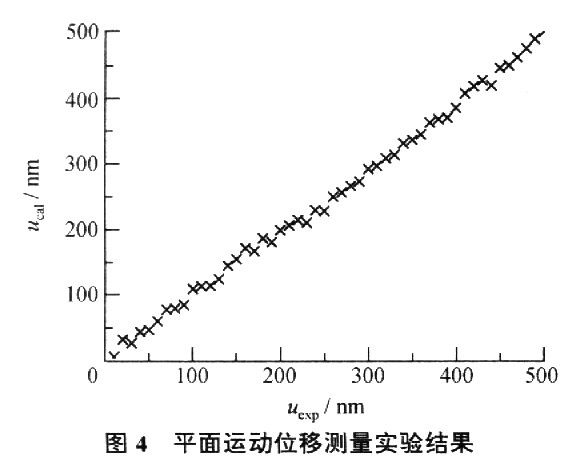
进行10次实验,每次实验中以10 nm的间隔测试50个点。通过比较,压电工作台的位移值和亚像素运动检测算法计算得到的位移值在数值上非常接近,10次实验的标准差的均值为0.0213,即测量精度达到l/50个像素。根据本系统中放大后的像素单元尺寸,采用数字图像相关和相关系数曲面拟合的方法可以实现7.2 nm8.3 nm的平面运动位移测量精度。
3.2 离面运动测量验证
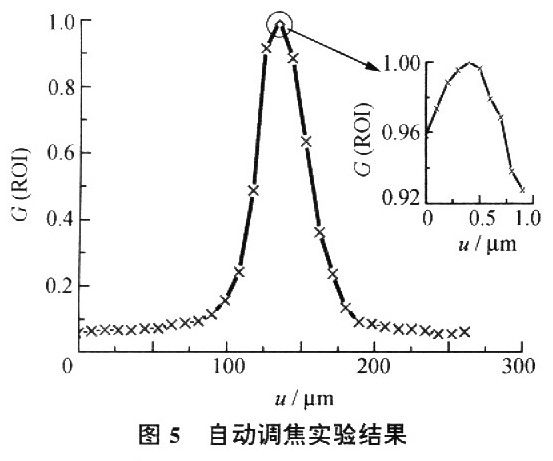
对被测MEMS器件进行自动调焦实验,以验证调焦算法和方案的可行性和性能。自动调焦采用粗精结合的方案;粗调装置选用步进电机,其步距角为1.8,驱动器采用20细分,显微镜的粗调每周36 mm,所以每个步距为细调使用上述PI公司P517.3CL压电工作台的z向移动,z向位移分辨率为O.1 nm,全程重复定位精度为l nm,行程为20μm。同样使用上述的微加速度计作为测试器件,先使用步进电机以9 μm的步距进行快速搜索,在搜索所得的最佳点附近通过压电工作台z向运动,以0.1 μm的步距进行精确的焦平面定位。图5为一次实验结果。多次实验结果表明,本系统的自动调焦系统有较高的重复精度,调焦精度可达0.1 μm。
为了从MEMS器件视觉图像中估计平面刚体运动,需要利用一定的数字图像处理技术来提取其运动位移。在实际应用中,整像素的位移是很容易获得的。但是实际的位移值一般不恰好为整像素,为提高数字图像相关方法的测量精度,在本系统中,使用数字图像相关求出像素级的位移再对其所得的相关系数进行二次曲面拟合的方法求取亚像素位移,具有抗噪能力强、计算量小、精度高等优点。
数字图像相关是对运动序列图像做相关求运动位移的方法。如图3所示,在图像1中选取(MN)大小的模板A,在图像2上模板位置(x,y)周围设定的计算窗口中移动,并按一定的相关函数与模板所覆盖的区域计算相关系数,寻找与模板匹配后相关系数值最大的位置。在这里选用效果较好的标准化协方差相关函数,
其取值范围为[-1,1]。其中:A(m,n)、B(m+i,n+j)分别为图像1中选取的模板的灰度分布和图像2上被移动的模板所覆盖到的区域的灰度分布,A、B为其平均灰度值。计算后在图像2上找到相关系数R最大的位置(x+dx,y+dy),所得的dx、dy即为像素级的运动位移。
对数字图像相关获取的像素级位移再通过相关系数曲面拟合的方法来求取亚像素位移。本文采用如下的二元二次多项式来拟合相关函数曲面。对像素级位移搜索到的位置(x+dx,y+dy)及其周围相邻的8个点用下面的二元二次函数来表示:
这里共有ao,…,a5 6个待定系数,而33的拟合窗口有9个方程,因此可以使用最小二乘法来求解。函数f(x,y)在拟合曲面的极值点应满足以下方程组:
2.3 自动调焦
对MEMS器件进行离面运动测试时,需要在每个“冻结”的运动位置上采用自动调焦技术来获取准确的焦平面位置以确定其相对运动位移。系统采用基于数字图像处理的方法进行自动调焦,对采集到的图像做去噪滤波的预处理,确定一个合理可靠的评价函数,根据该评价函数判断试样是否对焦,并判断离焦方向,向机电
驱动系统发送调焦信号,带动被测MEMS器件运动,达到自动调焦的目的。
基于数字图像处理方法的自动调焦最重要的就是寻找调焦评价函数,该判据应该具有无偏性、单峰性,且最好能反应离焦极性、信噪比等特性。在本系统中,为了提高运算速度,在图像内选取一块矩形区域(ROI,region ofinterest),检测其边缘的清晰度,计算它的梯度判别函数G(ROI)。计算表达式如下:
其中:S(i,j)为选取区域的光强值矩阵,M、N为矩阵的行和列。求解G(ROI)是对选取区域计算x和y向梯度,并对其平方相加,这相当于增加了高频分量的权重。
为兼顾调焦范围、调焦准确性和调焦速度的要求,本系统采用粗精结合的调焦策略。先用步进电机进行快速、粗略的焦平面位置搜索,并在搜索到的最佳点附近使用精密工作台的小步距z向移动进行高精度的定位,实现自动调焦的目的。
3 系统验证实验
3.1 平面运动测量验证
本实验通过测量装夹在高精度压电工作台上的微加速度计的微小移动来验证平面内位移算法的精度。CCD摄像机选用Sony公司的XC-ST50,像素数为768x 494,每个像素的大小8.4 μm9.8 μm,信噪比60 dB;图像采集卡选用NI公司的PCI-1409,10位灰度量化;显微镜物镜的放大倍数为25倍;此时CCD上每个像素对应于视场中336 nm392 nm大小的区域。三维压电工作台选用德国PI公司的P517.3CL,其x、y向的位移分辨率为1 nm,全程重复定位精度为5 nm,行程为100 μm100μm;由工作台定位引起的误差小于0.015个像素。图4为为验结果。
进行10次实验,每次实验中以10 nm的间隔测试50个点。通过比较,压电工作台的位移值和亚像素运动检测算法计算得到的位移值在数值上非常接近,10次实验的标准差的均值为0.0213,即测量精度达到l/50个像素。根据本系统中放大后的像素单元尺寸,采用数字图像相关和相关系数曲面拟合的方法可以实现7.2 nm8.3 nm的平面运动位移测量精度。
3.2 离面运动测量验证
对被测MEMS器件进行自动调焦实验,以验证调焦算法和方案的可行性和性能。自动调焦采用粗精结合的方案;粗调装置选用步进电机,其步距角为1.8,驱动器采用20细分,显微镜的粗调每周36 mm,所以每个步距为细调使用上述PI公司P517.3CL压电工作台的z向移动,z向位移分辨率为O.1 nm,全程重复定位精度为l nm,行程为20μm。同样使用上述的微加速度计作为测试器件,先使用步进电机以9 μm的步距进行快速搜索,在搜索所得的最佳点附近通过压电工作台z向运动,以0.1 μm的步距进行精确的焦平面定位。图5为一次实验结果。多次实验结果表明,本系统的自动调焦系统有较高的重复精度,调焦精度可达0.1 μm。
MEMS 电子 传感器 机器视觉 步进电机 自动化 虚拟仪器 加速度计 相关文章:
- 基于ARM9和MMC212xMG的数字寻北仪设计(03-16)
- 智能路灯控制系统设计与应用研究(03-24)
- 基于MEMS强链和FPGA的物理认证系统(04-14)
- 水平定向钻进跟踪/导向仪中地下传感发射探头(07-12)
- SoC的技术支持及嵌入式系统设计(07-26)
- 基于SCP1000-D01的气压计的设计(08-01)