PLC在机械手远程控制系统中的应用
时间:12-09
来源:互联网
点击:
4.上位机软件设计
4.1 编程语言
Visual Basic 6.0已成为Windows系统开发的主要语言,以其具有良好的图形用户接口并支持面向对象的程序设计和具有结构化的事件驱动程序模式,使得编程效率提高,应用功能增强。因此本文采用Visual Basic 6.0为上位机开发出具有个性的监控软件,实现对PLC的远程通信及监控。

图6 MSComm通信控件
在Windows操作系统下,Visual Basic 6.0提供了一个名为MSComm.ocx通信控件,它具备基本的串行通信能力,如图6所示。通过该控件可设置串行通信的数据发送和接收,对串行口状态及串行通信的信息格式和协议进行设置。在通信过程中,可以触发OnComm事件,用该事件可追踪、处理通信和错误事件的发生。
4.2 远程控制软件设计
在PLC与计算机的链接通讯中,计算机是上位机,PLC是下位机,机械手是被控对象。上位机始终处于主动地位,下位机处于被动地位,当PLC接收到计算机发送的命令后,自动生成应答指令,不需要再对其编写通讯程序。
根据控制功能的不同可将远程控制软件分为端口站号设置区、通信回路测试区、实时动画区、分步动作控制区、循环动作控制区。其中,分步动作控制区用于发送远程分步控制命令,循环动作控制区用于发送远程循环控制命令,上位机主控界面如图7所示。
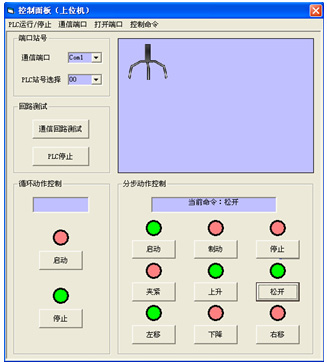
图7 主控界面
5.结束语
本文利用Visual Basic 6.0开发远程监控软件,应用三菱FX2N系列PLC控制机械手动作,实现了一种具有可视化功能,适用于工业现场的机械手远程控制系统。该系统可以完成远程手动控制、远程循环控制和现场手动控制,便于扩展,现已成功应用于我院自动化中心实验室。
6、本文创新点
1、 以计算机为主站,以PLC为控制器,实现了对机械手的远程控制;
2、 上位机监控软件以实时动画的形式,向操作人员提供机械手的运动情况,实现了操作过程的可视化;
3、 设计了计算机与PLC远程通信的协议,开发了通用的串行通信接口程序。
4.1 编程语言
Visual Basic 6.0已成为Windows系统开发的主要语言,以其具有良好的图形用户接口并支持面向对象的程序设计和具有结构化的事件驱动程序模式,使得编程效率提高,应用功能增强。因此本文采用Visual Basic 6.0为上位机开发出具有个性的监控软件,实现对PLC的远程通信及监控。
图6 MSComm通信控件
在Windows操作系统下,Visual Basic 6.0提供了一个名为MSComm.ocx通信控件,它具备基本的串行通信能力,如图6所示。通过该控件可设置串行通信的数据发送和接收,对串行口状态及串行通信的信息格式和协议进行设置。在通信过程中,可以触发OnComm事件,用该事件可追踪、处理通信和错误事件的发生。
4.2 远程控制软件设计
在PLC与计算机的链接通讯中,计算机是上位机,PLC是下位机,机械手是被控对象。上位机始终处于主动地位,下位机处于被动地位,当PLC接收到计算机发送的命令后,自动生成应答指令,不需要再对其编写通讯程序。
根据控制功能的不同可将远程控制软件分为端口站号设置区、通信回路测试区、实时动画区、分步动作控制区、循环动作控制区。其中,分步动作控制区用于发送远程分步控制命令,循环动作控制区用于发送远程循环控制命令,上位机主控界面如图7所示。
图7 主控界面
5.结束语
本文利用Visual Basic 6.0开发远程监控软件,应用三菱FX2N系列PLC控制机械手动作,实现了一种具有可视化功能,适用于工业现场的机械手远程控制系统。该系统可以完成远程手动控制、远程循环控制和现场手动控制,便于扩展,现已成功应用于我院自动化中心实验室。
6、本文创新点
1、 以计算机为主站,以PLC为控制器,实现了对机械手的远程控制;
2、 上位机监控软件以实时动画的形式,向操作人员提供机械手的运动情况,实现了操作过程的可视化;
3、 设计了计算机与PLC远程通信的协议,开发了通用的串行通信接口程序。
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 解密波音747飞机中的Sperry垂直陀螺仪(05-06)
- lns构架智能小区安防及关键技术应用研究(06-09)
- 基于MSP430及PROFIBUS的监测子站设计(06-12)