基于PLC的自动扶梯多功能变频节能控制系统设计
时间:12-07
来源:互联网
点击:
3 系统设计
3.1 控制系统组成
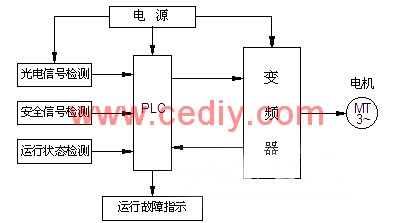
图3 控制系统框图
由图3可知,该系统主要由以下几部分组成:电源、PLC、变频器等。PLC是控制系统的核心,PLC根据输入的光电信号是否有效确定高速运行指令的输出,变频器根据PLC的高速运行指令控制扶梯的运行速度,完成扶梯的快慢及快慢停循环运行。
3.2 硬件选型
以自动扶梯变频非自启动(快慢循环)为例,其扶梯控制系统实际需要输入11点,输出7点,PLC主控制器采用欧姆龙CPM1A-20CDR-A-V1型PLC。这种机型的PLC配有相应的编程软件CX-Programmer进行编程及监视,不仅可以通过手持编程器对PLC编程,也可在个人PC机上进行编程。在扶梯运行过程中,可通过程序内部辅助继电器的状态监控电梯运行状态,现场调试十分方便。
变频器采用汇川公司的MD320变频器。MD系列变频器具备完善的输入输出接口,全系列独立风道和散热器柜内柜外安装可选,可以提供接近IP54防护要求的解决方案,其系统设计尤其适合恒转矩负载使用。
4 系统设计
4.1 变频控制主电路
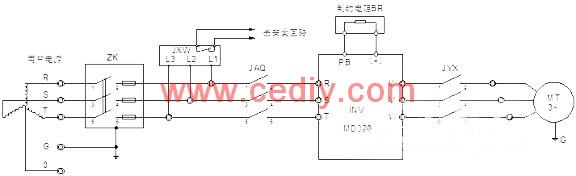
图4 变频控制主回路
图4示出主回路主要由主空开ZK、相序保护继电器JXW、安全接触器JAQ、运行接触器JYX、主电机MT等组成。
4.2 PLC输入输出口分配
输入输出口分配如附表所示。
附表 输入输出口分配表

4.3 运行控制回路
图5为运行控制回路。
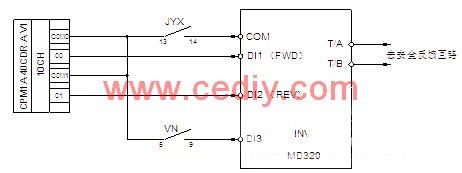
图5 运行控制回路
扶梯的运行控制由PLC与变频器一起完成。下面以变频非自启动(快慢循环)为例介绍扶梯节能运行工作原理。
变频器实时监测PLC的输出信号,从而决定扶梯的下一步运行。例如(1)扶梯的方向控制:当变频器的端子DI1接收到PLC的信号时,输出正转,扶梯实现上行运行;反之,端子DI2有效时,输出反转,扶梯实现下行运行。(2)高速运行的控制:变频器内预先设定好多段速控制的速度频率,扶梯以节能低速待机运行时,只有运行接触器(JYX)吸合,当PLC检测到光电信号时,输出高速运行指令信号,此时高速运行接触器(VN)吸合,变频器端子DI3有效,扶梯立即平稳的加速到设定频率高速运行。
4.4 典型控制程序设计
下面针对程序中的运行方式、节能时间控制两个子程序作重点介绍。
4.4.1 变频非自启动(快慢循环)和自启动(快慢停循环)方式的选择
方式的选择见图6。
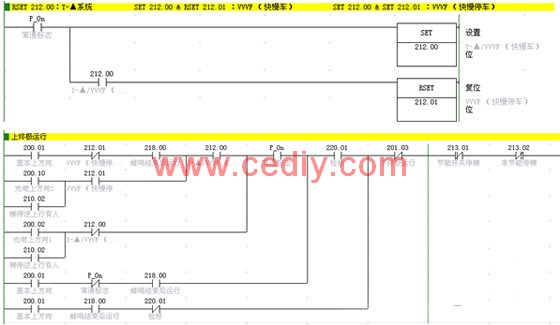
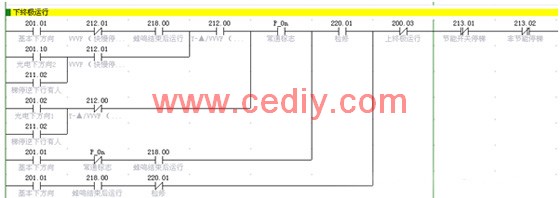
图6 快慢循环和快慢停循环子程序
只需修改程序中的SET和RSET 的组合,即可实现两种不同运行方式的切换。
快慢循环,设置为SET 212.00和RSET 212.01。
快慢停循环,设置为SET 212.00和SET 212.01。
4.4.2 节能时间的控制
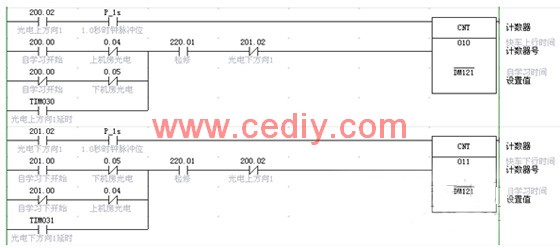
图7 节能时间的子程序
快车运行保持时间,可由上述计数器设定,从而能够满足不同提升高度和速度的扶梯使用(见图7)。
4.5 试验数据
为了验证本系统的节能效果,我们选择某现场进行测试。现场曳引电机功率为7.5kW,对比变频节能控制与普通Y-△控制的扶梯电量消耗。扶梯有乘客使用与空载运行时,各测试4个小时。实际测试下来采用节能的扶梯,满载运行时,耗电25.3kWh,而使用普通Y-△控制扶梯耗电26kWh;空载运行时,耗电1.8kWh,而使用普通Y-△控制扶梯耗电8.4kWh。从这个实例可以看出,变频节能控制的扶梯比普通Y-△控制的扶梯节能22%。
而如果采用无人乘梯时让扶梯停下来,与改造之前相比可节能约30%。实际使用中,如果扶梯慢下来或者停下来的时间越长,节能效果越明显。
5 结束语
该设计已经广泛应用于扶梯的节能改造,目前已在武汉、上海等大城市有三百多台被安装使用。实践证明,采用基于PLC及变频器控制的扶梯节能系统可靠、运行稳定,很有效的节约了用户的使用成本。
3.1 控制系统组成
图3 控制系统框图
由图3可知,该系统主要由以下几部分组成:电源、PLC、变频器等。PLC是控制系统的核心,PLC根据输入的光电信号是否有效确定高速运行指令的输出,变频器根据PLC的高速运行指令控制扶梯的运行速度,完成扶梯的快慢及快慢停循环运行。
3.2 硬件选型
以自动扶梯变频非自启动(快慢循环)为例,其扶梯控制系统实际需要输入11点,输出7点,PLC主控制器采用欧姆龙CPM1A-20CDR-A-V1型PLC。这种机型的PLC配有相应的编程软件CX-Programmer进行编程及监视,不仅可以通过手持编程器对PLC编程,也可在个人PC机上进行编程。在扶梯运行过程中,可通过程序内部辅助继电器的状态监控电梯运行状态,现场调试十分方便。
变频器采用汇川公司的MD320变频器。MD系列变频器具备完善的输入输出接口,全系列独立风道和散热器柜内柜外安装可选,可以提供接近IP54防护要求的解决方案,其系统设计尤其适合恒转矩负载使用。
4 系统设计
4.1 变频控制主电路
图4 变频控制主回路
图4示出主回路主要由主空开ZK、相序保护继电器JXW、安全接触器JAQ、运行接触器JYX、主电机MT等组成。
4.2 PLC输入输出口分配
输入输出口分配如附表所示。
附表 输入输出口分配表
4.3 运行控制回路
图5为运行控制回路。
图5 运行控制回路
扶梯的运行控制由PLC与变频器一起完成。下面以变频非自启动(快慢循环)为例介绍扶梯节能运行工作原理。
变频器实时监测PLC的输出信号,从而决定扶梯的下一步运行。例如(1)扶梯的方向控制:当变频器的端子DI1接收到PLC的信号时,输出正转,扶梯实现上行运行;反之,端子DI2有效时,输出反转,扶梯实现下行运行。(2)高速运行的控制:变频器内预先设定好多段速控制的速度频率,扶梯以节能低速待机运行时,只有运行接触器(JYX)吸合,当PLC检测到光电信号时,输出高速运行指令信号,此时高速运行接触器(VN)吸合,变频器端子DI3有效,扶梯立即平稳的加速到设定频率高速运行。
4.4 典型控制程序设计
下面针对程序中的运行方式、节能时间控制两个子程序作重点介绍。
4.4.1 变频非自启动(快慢循环)和自启动(快慢停循环)方式的选择
方式的选择见图6。
图6 快慢循环和快慢停循环子程序
只需修改程序中的SET和RSET 的组合,即可实现两种不同运行方式的切换。
快慢循环,设置为SET 212.00和RSET 212.01。
快慢停循环,设置为SET 212.00和SET 212.01。
4.4.2 节能时间的控制
图7 节能时间的子程序
快车运行保持时间,可由上述计数器设定,从而能够满足不同提升高度和速度的扶梯使用(见图7)。
4.5 试验数据
为了验证本系统的节能效果,我们选择某现场进行测试。现场曳引电机功率为7.5kW,对比变频节能控制与普通Y-△控制的扶梯电量消耗。扶梯有乘客使用与空载运行时,各测试4个小时。实际测试下来采用节能的扶梯,满载运行时,耗电25.3kWh,而使用普通Y-△控制扶梯耗电26kWh;空载运行时,耗电1.8kWh,而使用普通Y-△控制扶梯耗电8.4kWh。从这个实例可以看出,变频节能控制的扶梯比普通Y-△控制的扶梯节能22%。
而如果采用无人乘梯时让扶梯停下来,与改造之前相比可节能约30%。实际使用中,如果扶梯慢下来或者停下来的时间越长,节能效果越明显。
5 结束语
该设计已经广泛应用于扶梯的节能改造,目前已在武汉、上海等大城市有三百多台被安装使用。实践证明,采用基于PLC及变频器控制的扶梯节能系统可靠、运行稳定,很有效的节约了用户的使用成本。
- 家居安防无线监控报警系统(04-02)
- 提高实时系统数据采集质量的研究(04-09)
- 基于MSP430及PROFIBUS的监测子站设计(06-12)
- LED开始成为街道照明应用的最佳选择(07-13)
- 一种变频调速系统的SVPWM控制设计(02-03)
- 智能路灯控制系统设计与应用研究(03-24)