电力电子变压器并联运行动态的Matlab仿真
时间:12-07
来源:互联网
点击:
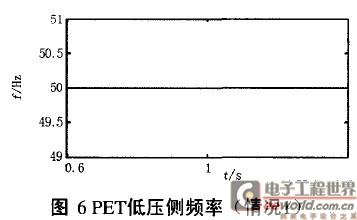
3.1 两台PET同时投入并联运行(情况1)
1.0s时,两台PET在低压侧由空载投入并联运行,承担功率因数为0.8的综合性负载。有关变量波形如图4-图6所示。由图可以看出,两台PET对应变量的波形一致。并联运行后所承担的负载电流相等,实现了均流控制以及有功、无功负荷的稳定分配,且频率保持恒定值不变。


3.2 PET2加入并联运行(情况2)
PET1 带载运行,1.0s时PET2由空载状态投入,两台PET并联运行。有关波形如图7和图8所示。由图可见,PET1由单机运行状态切换至并联运行状态后,其承担的负载电流、有功和无功负荷均有所下降,下降部分由PET2来承担,最终两台并联PET之间实现了均流控制以及有功、无功负荷的稳定分配且具有良好的动态响应性能。


4 结 论
本文基于有功和无功调差特性方程建立了PET控制策略及模型,基于该模型对PET并联运行动态过程进行仿真研究。仿真结果表明,该控制策略可以在保持额定供电频率的前提下,实现有功、 无功负荷的稳定分配,且动态特性良好。
1.0s时,两台PET在低压侧由空载投入并联运行,承担功率因数为0.8的综合性负载。有关变量波形如图4-图6所示。由图可以看出,两台PET对应变量的波形一致。并联运行后所承担的负载电流相等,实现了均流控制以及有功、无功负荷的稳定分配,且频率保持恒定值不变。
3.2 PET2加入并联运行(情况2)
PET1 带载运行,1.0s时PET2由空载状态投入,两台PET并联运行。有关波形如图7和图8所示。由图可见,PET1由单机运行状态切换至并联运行状态后,其承担的负载电流、有功和无功负荷均有所下降,下降部分由PET2来承担,最终两台并联PET之间实现了均流控制以及有功、无功负荷的稳定分配且具有良好的动态响应性能。
4 结 论
本文基于有功和无功调差特性方程建立了PET控制策略及模型,基于该模型对PET并联运行动态过程进行仿真研究。仿真结果表明,该控制策略可以在保持额定供电频率的前提下,实现有功、 无功负荷的稳定分配,且动态特性良好。
电力电子 变压器 电子 仿真 电压 PWM 电路 电流 逆变器 电感 IGBT 相关文章:
- 基于DSP高精度伺服位置环设计(06-21)
- 基于DSP的工业缝纫机控制系统设计(09-23)
- LED日光灯设计方案(12-22)
- 用FPGA平台实现工业电机最大效率(12-24)
- 2 kW有源功率因数校正电路设计(03-12)
- 低压配电系统中的静止无功发生器设计(03-26)