DSP在污水处理溶解氧控制方面的应用
时间:11-28
来源:互联网
点击:
3 系统软件设计
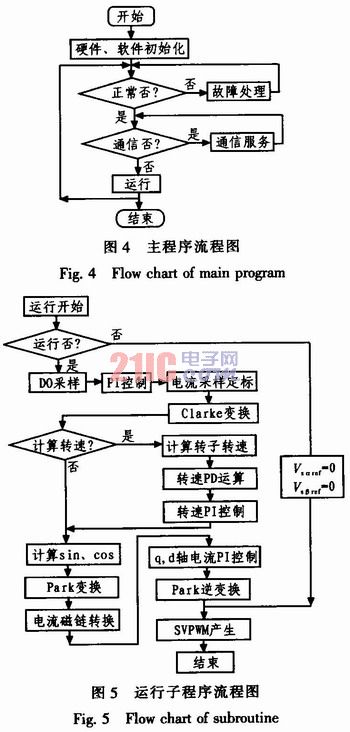
系统软件部分的设计主要由主程序、运行控制子程序等组成,如图4和图5所示。主程序完成硬件、软件初始化、故障检测及处理、通信、运行等,硬件初始化主要完成DSP的设置,如看门狗、时钟、计时器、ADC、SCI、I/O、事件管理(EV)等的设置,软件初始化主要对软件变量赋予初值,DSP通过SCI串口与上位机(微机)保持通信,接收上位机传送的命令,更新变量和标志,实现实时追踪控制。运行控制子程序主要是通过电动机的FOC矢量变频控制,实现对CCAS反应池内溶解氧DO大小进行监测和闭环控制。
4 实验仿真
应用Matlab建立控制系统仿真模型,仿真参数设置如下:
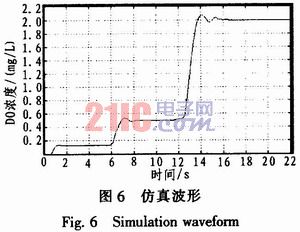
一般情况下厌氧池的DO小于O.1 mg/L,缺氧池的DO小于0.5 mg/L,耗氧池的DO控制在2~3 mg/L之间,通过对CCAS反应池内溶解氧DO的给定设置(2、0.5、O.1 mg/L)并进行仿真,仿真结果如图6所示。从仿真曲线可以看出,随系统设置给定的变化,在不同阶段系统控制输出信号上升较快,调节时间较短,参数稳定,克服了时滞大惯性缓解对系统性能的影响,实时控制及时,稳定效果较好。
5 结论
该系统通过采用TMS320LF2812控制芯片组成控制系统,完成对风机的矢量变频调速控制,节能、控制效果好,使系统具有良好的动态响应性能和静态性能;通过引入的Smith预估补偿控制,提高了系统的响应速度和系统的鲁棒性,并使系统具有硬件简单和性价比高等优点。
系统软件部分的设计主要由主程序、运行控制子程序等组成,如图4和图5所示。主程序完成硬件、软件初始化、故障检测及处理、通信、运行等,硬件初始化主要完成DSP的设置,如看门狗、时钟、计时器、ADC、SCI、I/O、事件管理(EV)等的设置,软件初始化主要对软件变量赋予初值,DSP通过SCI串口与上位机(微机)保持通信,接收上位机传送的命令,更新变量和标志,实现实时追踪控制。运行控制子程序主要是通过电动机的FOC矢量变频控制,实现对CCAS反应池内溶解氧DO大小进行监测和闭环控制。
4 实验仿真
应用Matlab建立控制系统仿真模型,仿真参数设置如下:
一般情况下厌氧池的DO小于O.1 mg/L,缺氧池的DO小于0.5 mg/L,耗氧池的DO控制在2~3 mg/L之间,通过对CCAS反应池内溶解氧DO的给定设置(2、0.5、O.1 mg/L)并进行仿真,仿真结果如图6所示。从仿真曲线可以看出,随系统设置给定的变化,在不同阶段系统控制输出信号上升较快,调节时间较短,参数稳定,克服了时滞大惯性缓解对系统性能的影响,实时控制及时,稳定效果较好。
5 结论
该系统通过采用TMS320LF2812控制芯片组成控制系统,完成对风机的矢量变频调速控制,节能、控制效果好,使系统具有良好的动态响应性能和静态性能;通过引入的Smith预估补偿控制,提高了系统的响应速度和系统的鲁棒性,并使系统具有硬件简单和性价比高等优点。
DSP 电路 电流 电动机 传感器 电压 PWM 逆变器 IGBT CMOS 霍尔传感器 电阻 编码器 看门狗 ADC 仿真 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 智能视频多媒体技术的应用(05-31)
- 提高实时系统数据采集质量的研究(04-09)
- 2009视频监控:网络化及其推动的几大趋势(06-03)
- 高清化:视频监控领域的下一个里程碑(06-04)