基于PXA270的移动天文观测系统设计
时间:11-18
来源:互联网
点击:
5 观测的结果
观测结果包括:拍摄到的图像、拍摄时所在地的经纬度、拍摄时间、大气温度及拍摄的星体名称等。存储时以文件的形式按时间存储,形成观测日志。
对天体视位置计算算法及望远镜实际指向进行了测试。天体视位置算法的测试是选择有代表性的四个天体(太阳、大鸟六、月球、金星),通过与专业天文软件 STARCALC的计算结果进行比对,衡量计算误差的大小。望远镜实际指向的测试采用现场测量的方法。使用的主要测试工具为计算机、量角器等,测试数据如表1所示。
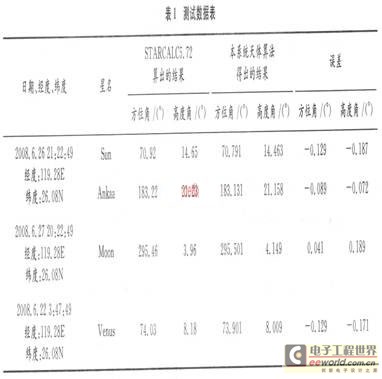
从比较结果可以看出,由本系统的天体视位置计算算法得出的方位角平均误差为0.261°,高度角平均误差为0.155°,小于系统使用望远镜(物镜焦距360 mm,目镜焦距20 mm)视角6.35°,满足系统观测要求。
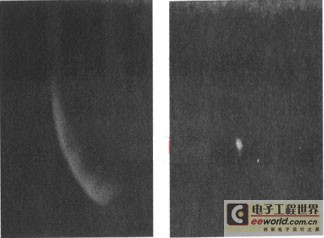
图4给出北京时间2008年6月27日20:22:49,在福州大学城(东经119.29°,北纬26.08°)对月球的观测图像;图5给出北京时间2008年6月22日3:47:49,在福州大学城(东经119.29°,北纬26.08°)对金星的观测图像。
6 结 语
经测试,系统工作正常,性能表现良好,达到了原设计目标。但是因为机械系统精度较差,选用的天文望远镜受价格约束,使本系统的总体表现受到一定影响。本系统稍加改动,亦可用于远距离视频监控、人造卫星接收、天线指向控制、太阳能电池板指向控制等领域。
观测结果包括:拍摄到的图像、拍摄时所在地的经纬度、拍摄时间、大气温度及拍摄的星体名称等。存储时以文件的形式按时间存储,形成观测日志。
对天体视位置计算算法及望远镜实际指向进行了测试。天体视位置算法的测试是选择有代表性的四个天体(太阳、大鸟六、月球、金星),通过与专业天文软件 STARCALC的计算结果进行比对,衡量计算误差的大小。望远镜实际指向的测试采用现场测量的方法。使用的主要测试工具为计算机、量角器等,测试数据如表1所示。
从比较结果可以看出,由本系统的天体视位置计算算法得出的方位角平均误差为0.261°,高度角平均误差为0.155°,小于系统使用望远镜(物镜焦距360 mm,目镜焦距20 mm)视角6.35°,满足系统观测要求。
图4给出北京时间2008年6月27日20:22:49,在福州大学城(东经119.29°,北纬26.08°)对月球的观测图像;图5给出北京时间2008年6月22日3:47:49,在福州大学城(东经119.29°,北纬26.08°)对金星的观测图像。
6 结 语
经测试,系统工作正常,性能表现良好,达到了原设计目标。但是因为机械系统精度较差,选用的天文望远镜受价格约束,使本系统的总体表现受到一定影响。本系统稍加改动,亦可用于远距离视频监控、人造卫星接收、天线指向控制、太阳能电池板指向控制等领域。
嵌入式 电子 Linux LCD 触摸屏 电路 GPS 单片机 传感器 温度传感器 视频监控 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于FPGA安全封装的身份认证模型研究(05-27)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 智能视频多媒体技术的应用(05-31)