三轴影像测量仪的开发与研制
时间:09-14
来源:互联网
点击:
一、 图像采集卡的选择
仪表盘的外形尺寸为220mm×82mm,要求测量精度不低于0.13mm。综合检测精度、检测速度和成本要求,系统选择NI 1394图像采集卡,配合SONY 1394 CCD彩色摄像机(分辨率为1024×768), 这样视觉系统的视场范围FOV=118mm×88.5mm,像素精度pixel accuracy= 118÷1024=0.1152mm/pixel,完全满足系统测量的尺寸精度要求。
二、 扫描区域划分
根据仪表盘的尺寸、目标特征的相关性和视觉系统FOV的范围,将仪表盘划分为左、中、右3个检测区域。加上起始位置共有4个位置。摄像机在X/Z轴上运动,被测仪表盘在Y轴上运动,X/Y轴的运动完成镜头对目标的对准,Z轴的运动完成对目标的聚焦。在每个检测位置采集的图像分别以中间的LED窗口即AUTO LED、OFF LED、Defrost LED的中心为该幅图像的坐标原点。
三、 系统总体结构设计
以计算机系统来完成图像的采集、处理、判断、文件I/O和用户使用界面,同时作为上位计算机通过串口对PLC进行控制;以PLC系统来完成运动控制、I/O控制。计算机系统的框图如下:

上位链接的参数设置:波特率:115200; 7位数据位;偶校验;2位停止位。
PLC的系统框图如下:

通过计算机系统与PLC系统协同工作,各司其职,充分发挥各自的特长,使系统的性能得以优化。
四、 图像采集
NI提供两种标准的图像采集vi程序,用户可以直接调用:
1.单帧图像采集1394-snap-acquire:即每次只采集1帧图像。在本系统的全自动测量过程中,共有三个被测区域,每个区域又有三种照明模式,所以一共需要运行9次单帧图像采集程序。
2.连续图像采集1394-grab-acquire:即连续实时采集图像。在本系统的运动位置设置模块里,需要实时观测镜头与被测目标的相对位置及聚焦情况,然后保存各个位置,所以使用了连续图像采集模式。
五、 图像处理
如上所述,在全自动测量过程中,共采集9帧图像,每幅图像都对应一个图像处理程序,来完成对目标特征的测量和判断。步骤如下:
1.开辟图像缓冲区
在图像处理中,需要对图像做多次变换,因此需开辟多个图像缓冲区来存储图像数据。本系统中共设置100个图像缓冲区,即image buffer0"buffer99, 其中buffer0为系统实时图像缓冲区;buffer1"buffer51分别存储9帧图像的彩色原图、Intensity 图层、Red图层、Green图层、Blue图层、Mask图层、Overlay图层等作为历史图像数据,可以和测量结果数据相对照;其余为临时图像缓冲区,为避免与历史图像缓冲区发生冲突,从buffer99开始向下使用。本系统只使用了12个临时buffer, 即buffer99" buffer88,buffer52"buffer87未使用。
2.定位原点并建立坐标系
选取图像上不发生变化的特征,使用Match Pattern 或Detect Object来定位原点并建立坐标系。三个检测区域分别以中间的LED窗口即AUTO LED、OFF LED、Defrost LED的中心为该幅图像的坐标原点。
3.定义ROI区域
根据被测目标不同的形状,可以使用不同的ROI模型,包括圆形、环形、扇形、矩形、旋转矩形、任意多边形等。所有ROI区域都以坐标原点为参考点。
4. 测量
通过抽取彩色图像的Intensity plane、Red Plane、Green Plane、Blue Plan(均为8位深度的图像),对各目标ROI区域分别测量光强分量Intensity、颜色分量R/G/B、镭雕图案模式匹配分数、位置坐标等。
其中光强Intensity/R/G/B的范围为0"255,共256个灰阶。
图案模式匹配分数的满分为1000分,得分大小表示目标与标准模型的匹配程度。对三组字符除了做模式匹配测量还做了OCR字符识别,即需要分别识别出AUTO、ECON、OFF。
位置坐标需要进行坐标系变换。对于一幅图像来说,默认的坐标原点位于图像的左上角,测量的直接位置数据是相对于这个原点的,和我们在步骤2.中定义的原点位置不同,坐标系方向也不同。参考下图:
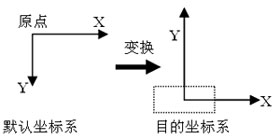
变换后的坐标仍是以像素为单位的,需要乘以像素精度pixel accuracy转化为mm单位,这样才对产品检验有意义。
5.结果输出界面
测量结果包括图像和数据,放在一个Table容器中。Table的第一个Page用来存放图像。图像以二维数组为容器,分为9行5列,存放45幅图像,包含9幅采集的图像和抽取的36幅分量图层。Table的第2"11共10个Page用来存放测量数据,分别以10张表格形式输出,分别对应9幅采集的图像的测量数据和重要特征的全局比较。每个Page上有一个布尔量显示控件,用于指示当前页面的综合判断结果。

图2 Middle area Function LED mode image
以下仅给出中部检测图像和数据,请参考图2-图7

图3 Middle area Function mode measure data
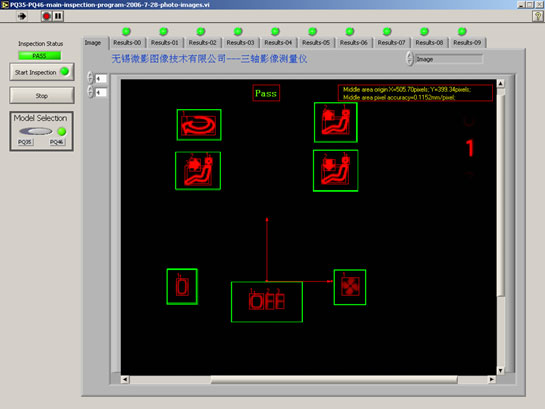
图4 Middle area Night mode image
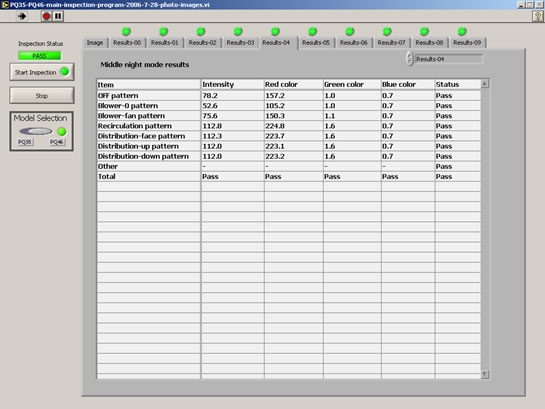
图5 Middle area Night mode measure data

图6 Middle area Day mode measure data
仪表盘的外形尺寸为220mm×82mm,要求测量精度不低于0.13mm。综合检测精度、检测速度和成本要求,系统选择NI 1394图像采集卡,配合SONY 1394 CCD彩色摄像机(分辨率为1024×768), 这样视觉系统的视场范围FOV=118mm×88.5mm,像素精度pixel accuracy= 118÷1024=0.1152mm/pixel,完全满足系统测量的尺寸精度要求。
二、 扫描区域划分
根据仪表盘的尺寸、目标特征的相关性和视觉系统FOV的范围,将仪表盘划分为左、中、右3个检测区域。加上起始位置共有4个位置。摄像机在X/Z轴上运动,被测仪表盘在Y轴上运动,X/Y轴的运动完成镜头对目标的对准,Z轴的运动完成对目标的聚焦。在每个检测位置采集的图像分别以中间的LED窗口即AUTO LED、OFF LED、Defrost LED的中心为该幅图像的坐标原点。
三、 系统总体结构设计
以计算机系统来完成图像的采集、处理、判断、文件I/O和用户使用界面,同时作为上位计算机通过串口对PLC进行控制;以PLC系统来完成运动控制、I/O控制。计算机系统的框图如下:
上位链接的参数设置:波特率:115200; 7位数据位;偶校验;2位停止位。
PLC的系统框图如下:
通过计算机系统与PLC系统协同工作,各司其职,充分发挥各自的特长,使系统的性能得以优化。
四、 图像采集
NI提供两种标准的图像采集vi程序,用户可以直接调用:
1.单帧图像采集1394-snap-acquire:即每次只采集1帧图像。在本系统的全自动测量过程中,共有三个被测区域,每个区域又有三种照明模式,所以一共需要运行9次单帧图像采集程序。
2.连续图像采集1394-grab-acquire:即连续实时采集图像。在本系统的运动位置设置模块里,需要实时观测镜头与被测目标的相对位置及聚焦情况,然后保存各个位置,所以使用了连续图像采集模式。
五、 图像处理
如上所述,在全自动测量过程中,共采集9帧图像,每幅图像都对应一个图像处理程序,来完成对目标特征的测量和判断。步骤如下:
1.开辟图像缓冲区
在图像处理中,需要对图像做多次变换,因此需开辟多个图像缓冲区来存储图像数据。本系统中共设置100个图像缓冲区,即image buffer0"buffer99, 其中buffer0为系统实时图像缓冲区;buffer1"buffer51分别存储9帧图像的彩色原图、Intensity 图层、Red图层、Green图层、Blue图层、Mask图层、Overlay图层等作为历史图像数据,可以和测量结果数据相对照;其余为临时图像缓冲区,为避免与历史图像缓冲区发生冲突,从buffer99开始向下使用。本系统只使用了12个临时buffer, 即buffer99" buffer88,buffer52"buffer87未使用。
2.定位原点并建立坐标系
选取图像上不发生变化的特征,使用Match Pattern 或Detect Object来定位原点并建立坐标系。三个检测区域分别以中间的LED窗口即AUTO LED、OFF LED、Defrost LED的中心为该幅图像的坐标原点。
3.定义ROI区域
根据被测目标不同的形状,可以使用不同的ROI模型,包括圆形、环形、扇形、矩形、旋转矩形、任意多边形等。所有ROI区域都以坐标原点为参考点。
4. 测量
通过抽取彩色图像的Intensity plane、Red Plane、Green Plane、Blue Plan(均为8位深度的图像),对各目标ROI区域分别测量光强分量Intensity、颜色分量R/G/B、镭雕图案模式匹配分数、位置坐标等。
其中光强Intensity/R/G/B的范围为0"255,共256个灰阶。
图案模式匹配分数的满分为1000分,得分大小表示目标与标准模型的匹配程度。对三组字符除了做模式匹配测量还做了OCR字符识别,即需要分别识别出AUTO、ECON、OFF。
位置坐标需要进行坐标系变换。对于一幅图像来说,默认的坐标原点位于图像的左上角,测量的直接位置数据是相对于这个原点的,和我们在步骤2.中定义的原点位置不同,坐标系方向也不同。参考下图:
变换后的坐标仍是以像素为单位的,需要乘以像素精度pixel accuracy转化为mm单位,这样才对产品检验有意义。
5.结果输出界面
测量结果包括图像和数据,放在一个Table容器中。Table的第一个Page用来存放图像。图像以二维数组为容器,分为9行5列,存放45幅图像,包含9幅采集的图像和抽取的36幅分量图层。Table的第2"11共10个Page用来存放测量数据,分别以10张表格形式输出,分别对应9幅采集的图像的测量数据和重要特征的全局比较。每个Page上有一个布尔量显示控件,用于指示当前页面的综合判断结果。
图2 Middle area Function LED mode image
以下仅给出中部检测图像和数据,请参考图2-图7
图3 Middle area Function mode measure data
图4 Middle area Night mode image
图5 Middle area Night mode measure data
图6 Middle area Day mode measure data
LED PLC LabVIEW 传感器 步进电机 相关文章:
- 家居安防无线监控报警系统(04-02)
- 安森美90W太阳能LED街灯高能效解决方案(05-18)
- 高精度压力测控系统的试验研究(04-08)
- 提高实时系统数据采集质量的研究(04-09)
- 基于I2C总线的MSP430单片机应用系统设计(06-20)
- 基于DSP高精度伺服位置环设计(06-21)