CAN总线在变电所综合自动化中的设计及应用
时间:08-09
来源:互联网
点击:
3 CAN总线通信系统配置
3.1硬件组成
系统使用2套总线(CAN0、CAN1),每套包含独立的总线电缆、总线驱动器和总线控制器,可以实现物理介质、物理层、数据链路层及应用层的全面冗余。符合这一要求的微处理器可以选择Fujitsu公司推出的带双CAN控制器的16位微控制器MB90F543。
系统中2套总线采用热备份方式运行:一个CAN控制器作为系统上电后默认的CAN(可称为主CAN);另一个为系统的备用CAN(称之为从CAN),作为主CAN的冗余。系统正常工作时,主CAN总线(CAN0)投入运行。当主CAN总线发生故障时,从CAN总线(CAN1)投入运行。
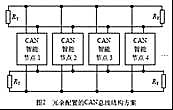
如上电检测到主CAN总线故障,则从CAN总线自动投入运行。这样在一套总线发生故障时,另一套总线自动继续工作,保证整个系统的通信功能正常运行,大大提高了系统的可靠性,实现了CAN总线的全面冗余设计。另外,也可以根据需要,由软件设定采取冗余方式或非冗余方式,对于非冗余方式只采用主CAN总线运行。本系统的结构方案如图2所示,其中RT为总线终端匹配电阻,用于抑制信号发射干扰,RT=100Ω或120Ω。网络采用屏蔽双绞线作为通信介质。
3.2系统软件设计
在双CAN冗余系统中,较之硬件结构而言,软件设计相对复杂。一般的CAN总线通信程序必须包括CAN初始化程序、CAN发送程序和CAN接收程序3个基本部分。在本冗余系统软件设计中,上面3部分作为3个最基本的模块,供系统其他软件模块调用。
由于系统采用双CAN冗余热备份方式运行,所以2个CAN控制器必须都处于热备份状态。系统中所有节点的2个CAN控制器经初始化后都随时准备接收信息,但有且只有一个CAN控制器在发送信息。换言之,在一个时间点上,系统中有且仅有一路CAN通道在工作,另一路处于监听状态(正常工作时)或故障状态(发生故障时)。
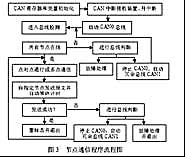
在本系统的软件设计中,除了用于数据发送和接收的实时数据通信程序外,还包括用于对各个节点进行管理的通信管理程序。总线管理功能程序供通信节点每隔一段时间调用,以此判断所有的节点是否都在线:如果所有节点都在线,则认为总线正常;否则识别离线节点,并作相应处理。若总线通信节点发生故障,由其他节点接管其工作,继续实施总线管理。通信程序流程如图3所示。
4 结束语
CAN总线以其独特的设计思想、优良的性能和极高的可靠性,越来越受到人们的重视。CAN只采用了ISO/OSI参考模型的1层和2层,对应用层需由用户自行定义。由于协议相对简单,所以CAN最突出的优点是价廉物美,具有较高的抗干扰能力。其多主机工作方式,使分布于不同地点的各个监控设备之间的数据交换变得更为灵活和直接。因此,CAN总线特别适合于工业过程控制中实现各控制设备之间的互连,在城市轨道交通电力监控领域中的应用也将日益广泛。
3.1硬件组成
系统使用2套总线(CAN0、CAN1),每套包含独立的总线电缆、总线驱动器和总线控制器,可以实现物理介质、物理层、数据链路层及应用层的全面冗余。符合这一要求的微处理器可以选择Fujitsu公司推出的带双CAN控制器的16位微控制器MB90F543。
系统中2套总线采用热备份方式运行:一个CAN控制器作为系统上电后默认的CAN(可称为主CAN);另一个为系统的备用CAN(称之为从CAN),作为主CAN的冗余。系统正常工作时,主CAN总线(CAN0)投入运行。当主CAN总线发生故障时,从CAN总线(CAN1)投入运行。
如上电检测到主CAN总线故障,则从CAN总线自动投入运行。这样在一套总线发生故障时,另一套总线自动继续工作,保证整个系统的通信功能正常运行,大大提高了系统的可靠性,实现了CAN总线的全面冗余设计。另外,也可以根据需要,由软件设定采取冗余方式或非冗余方式,对于非冗余方式只采用主CAN总线运行。本系统的结构方案如图2所示,其中RT为总线终端匹配电阻,用于抑制信号发射干扰,RT=100Ω或120Ω。网络采用屏蔽双绞线作为通信介质。
3.2系统软件设计
在双CAN冗余系统中,较之硬件结构而言,软件设计相对复杂。一般的CAN总线通信程序必须包括CAN初始化程序、CAN发送程序和CAN接收程序3个基本部分。在本冗余系统软件设计中,上面3部分作为3个最基本的模块,供系统其他软件模块调用。
由于系统采用双CAN冗余热备份方式运行,所以2个CAN控制器必须都处于热备份状态。系统中所有节点的2个CAN控制器经初始化后都随时准备接收信息,但有且只有一个CAN控制器在发送信息。换言之,在一个时间点上,系统中有且仅有一路CAN通道在工作,另一路处于监听状态(正常工作时)或故障状态(发生故障时)。
在本系统的软件设计中,除了用于数据发送和接收的实时数据通信程序外,还包括用于对各个节点进行管理的通信管理程序。总线管理功能程序供通信节点每隔一段时间调用,以此判断所有的节点是否都在线:如果所有节点都在线,则认为总线正常;否则识别离线节点,并作相应处理。若总线通信节点发生故障,由其他节点接管其工作,继续实施总线管理。通信程序流程如图3所示。
4 结束语
CAN总线以其独特的设计思想、优良的性能和极高的可靠性,越来越受到人们的重视。CAN只采用了ISO/OSI参考模型的1层和2层,对应用层需由用户自行定义。由于协议相对简单,所以CAN最突出的优点是价廉物美,具有较高的抗干扰能力。其多主机工作方式,使分布于不同地点的各个监控设备之间的数据交换变得更为灵活和直接。因此,CAN总线特别适合于工业过程控制中实现各控制设备之间的互连,在城市轨道交通电力监控领域中的应用也将日益广泛。
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 解密波音747飞机中的Sperry垂直陀螺仪(05-06)
- lns构架智能小区安防及关键技术应用研究(06-09)
- 基于MSP430及PROFIBUS的监测子站设计(06-12)