MCX314As型四轴运动控制器的原理及应用
时间:07-30
来源:互联网
点击:
3.2模式寄存器(WR1)
4都有各自的状态寄存器1,写哪个寄存器取决于NOP指令的指定或写前的情况,WR1可以控制输入信号IN3-IN0的使能,并用于设定减速状态和比较结果寄存器。
3.3 模式寄存器2(WR2)
WR2设定外部限位开关输入、反馈计数器脉冲类型及伺服驱动的反馈信号。
3.4 模式寄存器3(WR3)
4个轴都有各自的WR3,读哪个状态寄存器取决于已被指定的轴或NOP指令指定的轴。WR3可用于操作手动减速、单独减速、S曲线加/减速、外部操作模式设定和通用输出OUT7-OUT4的设定。
3.5 输出寄存器(WR4)
该寄存器用于设定4轴的输出信号nOUT3-nOUT0,它也可以被用作16位的通用输出,若某位置0,将会输出低电平;置1将会输出高电平。
3.6 主状态寄存器(RR0)
该寄存器用来显示各轴驱动和错误的状态,此外,它还显示插补、连续插补的就绪信号、圆插补的象限和BP插补的栈计数。
3.7状态寄存器(RR1、RR2、RR3)
每个轴都有状态寄存器RR1、RR2和RR3。读取哪个状态寄存器,取决于写入MCX314As的命令,命令10FH表示X轴,20FX表示Y轴,40FH表示Z轴,80FH表示U轴。
3.8 输入寄存器(RR4/RR5)
RR4和RR5为通用寄存器,如果寄存器的数据位为0,则输出为低电平,若数据位为1,则输出为高电平。
3.9 数据寄存器(RR6/RR7)
RR6和RR7是数据寄存器并对相应的数据读取命令。RR6存放低16位(D15-D0),RR7存放高16位(D31-D16)。
3.10 写数据命令
设置驱动参数的如加速度、驱动速度、输出脉冲数时,要用写数据命令,以将这些参数/数据写入MCX314As,如果同时指定多轴,可以对不同的轴同时写入相同的数据,如果数据长度是2B,只需把数据写入WR6,如果数据长度大于2B,则高16位写入WR7,低16位写入WR6。数据写入数据寄存器后,向WR0写入命令设定轴,然后执行命令。
3.11读取数据指令
数据读写命令用来读取各轴寄存器的值。当向WR0写入读命令后,数据将出现在RR6和RR7中,要读取的数据是二进制的,负值为二进制补码形式。
3.12驱动命令
驱动命令将控制MCX314As以不同的方式输出驱动脉冲。当向WR0写入命令代码并制订控制轴后,该命令被立即执行。可以同时用同一命令指定多轴,运行时,每个轴的RR0的nDRV位将置为1,当运行结束时,nDRV位置0。
3.13 插补命令
插补命令由2轴或3轴直线插补、顺时针/逆时针圆弧插补、2轴或3轴位模式插补和其他有关命令组成,当向WR0写入插补命令时,置WR0的D8-D1位为0,因为对插补命令没有必要指定轴。
在执行插补命令之前,必须先执行以下2步:通过设置WR5的D5-D0位来指定要插补的轴;设定主轴的速度参数。
4 应用电路
目前,占据国内数控市场主要份额的经济型数控系统多采用MCS-51系列单片机或MCS-51系列兼容的单片机,最高频率为12MHz-40MHz,但周期指令执行时间为250ns-1ms,限制了经济型数控系统的进一步发展,尤其是多轴高速联动、螺纹高速切割和高分辨率控制等功能受到限制,将MCX314As运动控制器和MCS-51系列单片机相结合构建高性能经济型数控系统,可以解决传统经济型数控系统速度慢、功能少、开发难度大等问题,具有很好的发展前景。
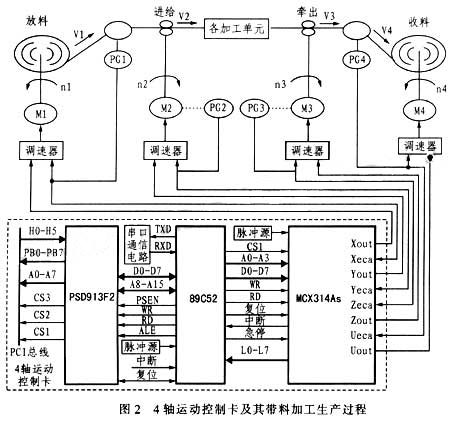
张力控制广泛应用于各种卷壳及滚筒组成的加工生产线,如造纸厂、印刷厂、纺织漂染厂和食品厂等,这些生产线在处理纸张、薄片、丝、线、布等大尺寸材料的过程中必须有一定的张力,张力太小会导致褶皱和套印不准等弊病;张力太大会无谓增加机器负荷并容易使材料断裂,而张力不稳定会使材料发生跳动也会导致套印不准及重影等,为了保持产品的品质、效率及可靠性,一套功能完备的张力控制系统是必需的。如图2所示。凹板印刷机的张力控制装置整体可以分为3部分:张力/速度检测装置、控制装置、执行机构及驱动器,其中,控制装置是系统控制的核心,本设计使用MCX314As和89C51型单片机来实现系统的张力控制和速度调整。
4轴运动控制卡以MCX314As为核心,采用89C52型单片机作为主控制器,并采用PSD913F2型可编程外围器件来替代传统的大部分外围器件,MCX341As的时钟频率由外部决定,本系统采用了MCX314As默认的16MHz频率作为时钟信号,图2中,PG1、PG2、PG3、PG4为光电编码器,M1、M2、 M3、M4是步进电机。
MCX314As的片选信号和低位地址A0-A3都由PSD913F2产生,数据线和读/写信号直接由89C51相应的数据线和读/写信号控制,中断信号触发89C52的外部中断端。MCX314As只有一个中断信号端口,所有中断信号必须进行“或运算”或输出到中断信号端口。中断源的使能和状态通过MCX314As上的写/读寄存器进行设置和判断。
89C52、PSD913F2和MCX314As能够提供32个通用输入端、32个通用输出端、13个可编程通用输入/输出端。这些端口用于S、M、T功能和各种反馈输入信号。
系统放卷和收卷电机控制脉冲由MCX314As产生,经过差分输出驱动器产生差分驱动输出,即可以控制数字式交流伺服驱动器,也可以控制步进电机驱动器和直流电机驱动器,外部反馈脉冲经过差分输入驱动后输入MCX314As,张力传感器信号和速度信号也可以直接输入MCX314As,通用输入/输出信号都要经过光电隔离,直至驱动后才能与MCS314As或PSD913F2相连。
4都有各自的状态寄存器1,写哪个寄存器取决于NOP指令的指定或写前的情况,WR1可以控制输入信号IN3-IN0的使能,并用于设定减速状态和比较结果寄存器。
3.3 模式寄存器2(WR2)
WR2设定外部限位开关输入、反馈计数器脉冲类型及伺服驱动的反馈信号。
3.4 模式寄存器3(WR3)
4个轴都有各自的WR3,读哪个状态寄存器取决于已被指定的轴或NOP指令指定的轴。WR3可用于操作手动减速、单独减速、S曲线加/减速、外部操作模式设定和通用输出OUT7-OUT4的设定。
3.5 输出寄存器(WR4)
该寄存器用于设定4轴的输出信号nOUT3-nOUT0,它也可以被用作16位的通用输出,若某位置0,将会输出低电平;置1将会输出高电平。
3.6 主状态寄存器(RR0)
该寄存器用来显示各轴驱动和错误的状态,此外,它还显示插补、连续插补的就绪信号、圆插补的象限和BP插补的栈计数。
3.7状态寄存器(RR1、RR2、RR3)
每个轴都有状态寄存器RR1、RR2和RR3。读取哪个状态寄存器,取决于写入MCX314As的命令,命令10FH表示X轴,20FX表示Y轴,40FH表示Z轴,80FH表示U轴。
3.8 输入寄存器(RR4/RR5)
RR4和RR5为通用寄存器,如果寄存器的数据位为0,则输出为低电平,若数据位为1,则输出为高电平。
3.9 数据寄存器(RR6/RR7)
RR6和RR7是数据寄存器并对相应的数据读取命令。RR6存放低16位(D15-D0),RR7存放高16位(D31-D16)。
3.10 写数据命令
设置驱动参数的如加速度、驱动速度、输出脉冲数时,要用写数据命令,以将这些参数/数据写入MCX314As,如果同时指定多轴,可以对不同的轴同时写入相同的数据,如果数据长度是2B,只需把数据写入WR6,如果数据长度大于2B,则高16位写入WR7,低16位写入WR6。数据写入数据寄存器后,向WR0写入命令设定轴,然后执行命令。
3.11读取数据指令
数据读写命令用来读取各轴寄存器的值。当向WR0写入读命令后,数据将出现在RR6和RR7中,要读取的数据是二进制的,负值为二进制补码形式。
3.12驱动命令
驱动命令将控制MCX314As以不同的方式输出驱动脉冲。当向WR0写入命令代码并制订控制轴后,该命令被立即执行。可以同时用同一命令指定多轴,运行时,每个轴的RR0的nDRV位将置为1,当运行结束时,nDRV位置0。
3.13 插补命令
插补命令由2轴或3轴直线插补、顺时针/逆时针圆弧插补、2轴或3轴位模式插补和其他有关命令组成,当向WR0写入插补命令时,置WR0的D8-D1位为0,因为对插补命令没有必要指定轴。
在执行插补命令之前,必须先执行以下2步:通过设置WR5的D5-D0位来指定要插补的轴;设定主轴的速度参数。
4 应用电路
目前,占据国内数控市场主要份额的经济型数控系统多采用MCS-51系列单片机或MCS-51系列兼容的单片机,最高频率为12MHz-40MHz,但周期指令执行时间为250ns-1ms,限制了经济型数控系统的进一步发展,尤其是多轴高速联动、螺纹高速切割和高分辨率控制等功能受到限制,将MCX314As运动控制器和MCS-51系列单片机相结合构建高性能经济型数控系统,可以解决传统经济型数控系统速度慢、功能少、开发难度大等问题,具有很好的发展前景。
张力控制广泛应用于各种卷壳及滚筒组成的加工生产线,如造纸厂、印刷厂、纺织漂染厂和食品厂等,这些生产线在处理纸张、薄片、丝、线、布等大尺寸材料的过程中必须有一定的张力,张力太小会导致褶皱和套印不准等弊病;张力太大会无谓增加机器负荷并容易使材料断裂,而张力不稳定会使材料发生跳动也会导致套印不准及重影等,为了保持产品的品质、效率及可靠性,一套功能完备的张力控制系统是必需的。如图2所示。凹板印刷机的张力控制装置整体可以分为3部分:张力/速度检测装置、控制装置、执行机构及驱动器,其中,控制装置是系统控制的核心,本设计使用MCX314As和89C51型单片机来实现系统的张力控制和速度调整。
4轴运动控制卡以MCX314As为核心,采用89C52型单片机作为主控制器,并采用PSD913F2型可编程外围器件来替代传统的大部分外围器件,MCX341As的时钟频率由外部决定,本系统采用了MCX314As默认的16MHz频率作为时钟信号,图2中,PG1、PG2、PG3、PG4为光电编码器,M1、M2、 M3、M4是步进电机。
MCX314As的片选信号和低位地址A0-A3都由PSD913F2产生,数据线和读/写信号直接由89C51相应的数据线和读/写信号控制,中断信号触发89C52的外部中断端。MCX314As只有一个中断信号端口,所有中断信号必须进行“或运算”或输出到中断信号端口。中断源的使能和状态通过MCX314As上的写/读寄存器进行设置和判断。
89C52、PSD913F2和MCX314As能够提供32个通用输入端、32个通用输出端、13个可编程通用输入/输出端。这些端口用于S、M、T功能和各种反馈输入信号。
系统放卷和收卷电机控制脉冲由MCX314As产生,经过差分输出驱动器产生差分驱动输出,即可以控制数字式交流伺服驱动器,也可以控制步进电机驱动器和直流电机驱动器,外部反馈脉冲经过差分输入驱动后输入MCX314As,张力传感器信号和速度信号也可以直接输入MCX314As,通用输入/输出信号都要经过光电隔离,直至驱动后才能与MCS314As或PSD913F2相连。
电路 步进电机 总线 滤波器 编码器 单片机 传感器 相关文章:
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 航天器DC/DC变换器的可靠性设计(02-12)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 卫星电源分系统可靠性设计与研究(02-12)