DSP在捷联惯性制导技术中的应用
时间:07-27
来源:互联网
点击:
3.3 系统程序设计
导航、制导计算都属于实时计算。要实现这一要求,软件就必须结合硬件来进行设计,以充分发挥硬件的功能。本设计充分利用了系统的中断功能,并以中断为主来进行程序设计,以使系统中各个部分的具体功能都可通过中断程序来实现。其系统工作过程如下:
加电开机→FLASH中的程序调入内存→系统初始化、自检→导航信息恢复→安装中断程序→打开中断→待机。
该系统的软件包括主程序、子程序和各中断响应程序等部分。
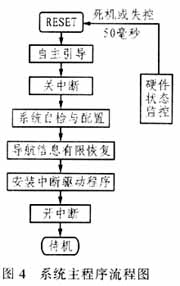
其中主程序是系统程序的框架,重要的初始化参数主要在主程序中定义,主程序通过调用子程序来完成系统初始化、自检、导航信息恢复、系统配置、中断程序配置等功能。其中,系统自检程序主要检测CPU、SRAM以及各接口芯片的工作是否正常。引导程序主要根据系统硬件中存储的状态信息来确定导航计算的起点。主要状态信息有:系统是加电开机还是死机后重新启动,以及上一次保存数据与当前的时间间隔等。根据系统硬件中保存的状态信息和非易失存储器中保存的导航信息可确定当前导航计算的基准点。系统主程序流程如图4所示。
子程序主要用来完成一些特定的功能,包括导航子程序、控制子程序、通讯子程序和卡尔曼滤波子程序等。
中断程序由硬件中断触发,除完成现场保护和硬件信息处理外,还可根据需要调用导航子程序、控制子程序、通讯子程序、状态监控子程序、卡尔曼滤波程序等,同时在处理完成后恢复现场并向主程序返回数据。
4 结束语
捷联惯性制导是一种很有应用价值的惯性制导方法,随着计算机技术的发展,该技术将迅速应用于各种战术武器中。本文并不企图在理论上进行创新,而是在技术上谋求好的实现方法。实验证明:用DSP芯片对惯性器件的信息进行处理,并用可编程器件进行逻辑电路的实现,可简化系统电路,提高系统的运算性能以及可靠性和灵活性。
导航、制导计算都属于实时计算。要实现这一要求,软件就必须结合硬件来进行设计,以充分发挥硬件的功能。本设计充分利用了系统的中断功能,并以中断为主来进行程序设计,以使系统中各个部分的具体功能都可通过中断程序来实现。其系统工作过程如下:
加电开机→FLASH中的程序调入内存→系统初始化、自检→导航信息恢复→安装中断程序→打开中断→待机。
该系统的软件包括主程序、子程序和各中断响应程序等部分。
其中主程序是系统程序的框架,重要的初始化参数主要在主程序中定义,主程序通过调用子程序来完成系统初始化、自检、导航信息恢复、系统配置、中断程序配置等功能。其中,系统自检程序主要检测CPU、SRAM以及各接口芯片的工作是否正常。引导程序主要根据系统硬件中存储的状态信息来确定导航计算的起点。主要状态信息有:系统是加电开机还是死机后重新启动,以及上一次保存数据与当前的时间间隔等。根据系统硬件中保存的状态信息和非易失存储器中保存的导航信息可确定当前导航计算的基准点。系统主程序流程如图4所示。
子程序主要用来完成一些特定的功能,包括导航子程序、控制子程序、通讯子程序和卡尔曼滤波子程序等。
中断程序由硬件中断触发,除完成现场保护和硬件信息处理外,还可根据需要调用导航子程序、控制子程序、通讯子程序、状态监控子程序、卡尔曼滤波程序等,同时在处理完成后恢复现场并向主程序返回数据。
4 结束语
捷联惯性制导是一种很有应用价值的惯性制导方法,随着计算机技术的发展,该技术将迅速应用于各种战术武器中。本文并不企图在理论上进行创新,而是在技术上谋求好的实现方法。实验证明:用DSP芯片对惯性器件的信息进行处理,并用可编程器件进行逻辑电路的实现,可简化系统电路,提高系统的运算性能以及可靠性和灵活性。
DSP 总线 集成电路 电路 MIPS CPLD 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 智能视频多媒体技术的应用(05-31)
- 提高实时系统数据采集质量的研究(04-09)
- 2009视频监控:网络化及其推动的几大趋势(06-03)
- 高清化:视频监控领域的下一个里程碑(06-04)