基于伺服电机和运动控制器的目标仿真实时性控制研究
时间:07-15
来源:互联网
点击:
上位机软件
上位机软件的组成如图4所示。

初始化模块:实现零位标定等功能。
轨迹和参数设定模块:根据不同的运动功能和轨迹,提供了相应的参数设定界面,其中包括参数合理性判别、缺省值提供等辅助功能。
运动信息实时显示模块:通过与DMC5400实时通讯,动态采集负载位置和速度等运动信息。然后,借助CB开发的带有二维坐标系的显示界面,实现实时动态显示负载运动轨迹,同时动态显示左右两个软硬限位状态。另外,在界面的右下角还实时动态显示负载的位置和速度数据。
故障诊断模块:内嵌于各功能模块中,如设定值合理性判别、键盘操作功能保护、界面功能按钮的连锁、电机限速保护、位置超速保护等。
通讯模块:利用DMC5400提供的动态链接库编制,实现上位PC机和下位DMC5400之间的通讯。它内嵌于各功能模块中,囊括了同DMC5400通讯的所有方式,而且将其主要的函数进行分类、封装。所编制的通讯程序实现了运动轨迹程序及设定参数的下载、上位PC机对DMC5400的指令传输及DMC5400对 PC机的状态反馈等通讯功能。
下位机软件
控制下位机是运动控制系统的直接控制级,构成可控扩束和可控衰减两个独立的伺服控制回路。其功能包括:实现目标运动的实时控制;采用相应的控制算法,对系统的运行位置、速度进行控制;将检测到的系统状态信号通过PCI总线传给上位机。DMC5400的运动控制功能十分丰富,可以满足绝大多数多轴运动控制系统的要求[3]。
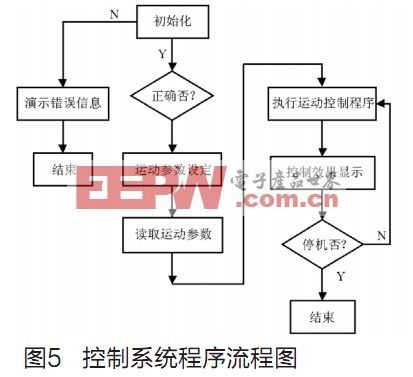
DMC5400运动控制卡提供基于Windows 95 /98/Me/NT/2000/XP下32位DLL驱动编程。其具体的编程语言可为VB、VC、C++Builder中的任何一种。在运动函数库中所使用到的函数主要有如下几种:控制卡及轴设置函数,独立运动和插补运动函数,制动函数,位置和状态的设置及查询函数,I/O口操作函数,错误代码函数。其函数返回值为0(函数执行正确)或-1(函数执行错误)。其控制系统的流程图如图5所示。
仿真结果分析
图6~11为半实物仿真试验与数学仿真试验激光制导炸弹空间三维坐标变化曲线,可见两种仿真模式下试验曲线吻合良好。由于在整个弹道曲线中差别表现不明显,因此给出了各坐标相应的弹道末端局部显示曲线。
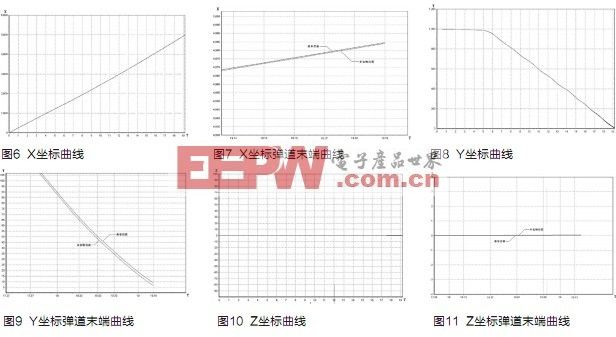
试验结果表明,数学仿真的仿真解算稳定,结果精度良好;同时,在相同投弹条件下,半实物仿真与数学仿真试验过程相关性比较好,仿真精度非常高,由此反映出目标仿真系统带入全系统的误差极小(目标系统误差占全系统误差的90%),所设计的控制系统实现了光斑大小和能量的实时控制。
参考文献:
[1]王仕成,张金生. 激光寻的制导武器目标仿真系统研制报告[R]. 第二炮兵工程学院自动控制教研室内部资料, 2004:1-20
[2]孙晶华. 目标模拟运动支架及控制系统的研制[D]. 西安电子科技大学硕士学位论文, 2004:10
[3]DMC5400简明手册. 深圳雷赛机电技术开发有限公司[D], 2005:11-13
[4]姜荣. 一种基于运动控制卡的伺服电机控制系统[J]. 测试与控制, 2006(5):113
[5]金钰. 伺服系统设计指导[M]. 北京:北京理上大学出版社,2000
作者:吴琳 崔洪亮 信东 刘丽英 第二炮兵青州士官学校 时间:2010-06-21
上位机软件的组成如图4所示。
初始化模块:实现零位标定等功能。
轨迹和参数设定模块:根据不同的运动功能和轨迹,提供了相应的参数设定界面,其中包括参数合理性判别、缺省值提供等辅助功能。
运动信息实时显示模块:通过与DMC5400实时通讯,动态采集负载位置和速度等运动信息。然后,借助CB开发的带有二维坐标系的显示界面,实现实时动态显示负载运动轨迹,同时动态显示左右两个软硬限位状态。另外,在界面的右下角还实时动态显示负载的位置和速度数据。
故障诊断模块:内嵌于各功能模块中,如设定值合理性判别、键盘操作功能保护、界面功能按钮的连锁、电机限速保护、位置超速保护等。
通讯模块:利用DMC5400提供的动态链接库编制,实现上位PC机和下位DMC5400之间的通讯。它内嵌于各功能模块中,囊括了同DMC5400通讯的所有方式,而且将其主要的函数进行分类、封装。所编制的通讯程序实现了运动轨迹程序及设定参数的下载、上位PC机对DMC5400的指令传输及DMC5400对 PC机的状态反馈等通讯功能。
下位机软件
控制下位机是运动控制系统的直接控制级,构成可控扩束和可控衰减两个独立的伺服控制回路。其功能包括:实现目标运动的实时控制;采用相应的控制算法,对系统的运行位置、速度进行控制;将检测到的系统状态信号通过PCI总线传给上位机。DMC5400的运动控制功能十分丰富,可以满足绝大多数多轴运动控制系统的要求[3]。
DMC5400运动控制卡提供基于Windows 95 /98/Me/NT/2000/XP下32位DLL驱动编程。其具体的编程语言可为VB、VC、C++Builder中的任何一种。在运动函数库中所使用到的函数主要有如下几种:控制卡及轴设置函数,独立运动和插补运动函数,制动函数,位置和状态的设置及查询函数,I/O口操作函数,错误代码函数。其函数返回值为0(函数执行正确)或-1(函数执行错误)。其控制系统的流程图如图5所示。
仿真结果分析
图6~11为半实物仿真试验与数学仿真试验激光制导炸弹空间三维坐标变化曲线,可见两种仿真模式下试验曲线吻合良好。由于在整个弹道曲线中差别表现不明显,因此给出了各坐标相应的弹道末端局部显示曲线。
试验结果表明,数学仿真的仿真解算稳定,结果精度良好;同时,在相同投弹条件下,半实物仿真与数学仿真试验过程相关性比较好,仿真精度非常高,由此反映出目标仿真系统带入全系统的误差极小(目标系统误差占全系统误差的90%),所设计的控制系统实现了光斑大小和能量的实时控制。
参考文献:
[1]王仕成,张金生. 激光寻的制导武器目标仿真系统研制报告[R]. 第二炮兵工程学院自动控制教研室内部资料, 2004:1-20
[2]孙晶华. 目标模拟运动支架及控制系统的研制[D]. 西安电子科技大学硕士学位论文, 2004:10
[3]DMC5400简明手册. 深圳雷赛机电技术开发有限公司[D], 2005:11-13
[4]姜荣. 一种基于运动控制卡的伺服电机控制系统[J]. 测试与控制, 2006(5):113
[5]金钰. 伺服系统设计指导[M]. 北京:北京理上大学出版社,2000
作者:吴琳 崔洪亮 信东 刘丽英 第二炮兵青州士官学校 时间:2010-06-21
仿真 步进电机 总线 电路 编码器 DSP 电子 相关文章:
- ARM在数字化远程视频监控系统的应用(05-20)
- FPGA在弹上信息处理机中的应用(04-15)
- 与MSP430 USI端口配合使用ADS8361(06-18)
- 基于ARM的I2C设备控制方法的实现(06-11)
- 辰汉电子推出低成本快速量产视频监控方案+4路输入方案(06-24)
- 无线IP视频监控应用即将井喷,Blackfin助您赢得先机(07-23)