基于嵌入式Linux的风力发电监控系统开发平台的构建
时间:03-06
来源:互联网
点击:
为了适应不同的应用场合,同时考虑到计算机系统的灵活性、可伸缩性以及可裁剪性,一种以应用为中心、以计算机技术为基础、软硬件可裁剪的嵌入式操作系统随之诞生。这种嵌入式系统能适用于对功能、可靠性、成本、体积、功耗要求严格的应用系统。而在众多嵌入式操作系统中,Linux以其体积小、可裁减、运行速度快、网络性能优良、源码公开等优点而被广泛采用。特别是2.6内核版本的Linux更是在实时性能方面有了很大的提高,因此在工业控制场合得到了越来越多的重视和应用。
本文正是在这一背景下,为基于S3C2410的嵌入式平台(扩充了多种外围设备,包括:LCD、A/D、网络芯片等等)构建出一个基于 Linux2.6.16内核的嵌入式系统开发平台,以满足风力发电监控系统开发的需求。
1系统构架
本系统的硬件平台是以32位高性能嵌入式处理器S3C2410A作为系统的CPU,其工作频率最高为203 MHz,具有强大的处理能力。另外,还扩展有多种外围设备,如:分辨率为640×480的26万色TFT液晶显示屏、串口、USB口、网口、64MB Flash、64MB SDRAM等等。可以充分满足风力发电监控系统开发的需求。
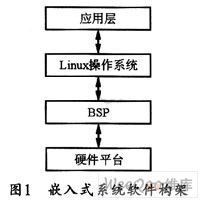
本硬件平台的软件构架主要分为以下几个部分:BSP层、操作系统层以及应用层,图1所示是其软件构架图。本系统的硬件平台是由嵌入式微处理器及其外围设备所构成的。硬件抽象层(BSP)是存储在硬件平台ROM或Flash上的负责与硬件底层交流的硬件驱动程序,主要负责对系统进行初始化,并将收集的硬件信息传递到接下来运行的操作系统内核中去。操作系统内核通过BSP来管理系统硬件资源,并为上层软件提供进程调度、内存管理、文件系统、设备驱动等服务。应用层主要负责与用户进行交流。
在完成系统的构架设计以后,就可以针对硬件平台进行具体的构建了,其工作主要包括以下几个部分:BootLoader移植、内核移植以及文件系统的建立等,其中内核移植包括网络设备、LCD和USB等驱动的移植。文中针对本系统的设计给出了相关程序的移植。
2 BootLoader移植
BootLoader (引导加载程序)是系统加电后运行的第一段代码。这段小程序用于初始化硬件设备和建立内存空间的映射图,从而将系统的软硬件环境带到一个合适的状态,以便为最终调用操作系统内核准备好正确的环境。
目前,较流行的BootLoader主要有U-boot和Vivi等。本设计主要是以S3C2410为控制器的硬件平台,因此可以选用带有网络功能的 Vivi作为系统的BootLoader。作为引导程序的Vivi一般分为stage1和stage2两大部分。stage1主要是根据CPU的体系结构进行设备初始化等工作,通常都用短小精悍的汇编语言来实现,而stage2则通常用C语言来实现,这样可以实现更加复杂的功能,且代码会具有更好的可读性和可移植性。为了使Vivi更适合本系统的硬件平台,设计时需要对其进行部分修改。
(1)修改编译器
首先要把Vivi中Makefile的有关编译的选项指向安装好的3.4.1版本的交叉编译工具链,将编译所需的Linux文件夹“UNUX- INCLUDE-DIR=”指向交叉编译器所在的文件夹“LINUX-INCLUDE- DIR=/usr/local/arm/3.4.1/include”,并将“CROSS-COMPILE=”项修改为“CROSS- COMPILE=/usr/local/arm/3.4.1/bin/arm-linux-”。
(2)修改启动参数
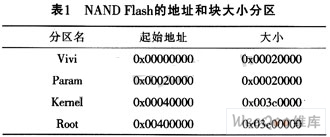
接着根据硬件平台的实际情况要修改Vivi中Flash分块情况。本系统将Flash划分成四个部分:第一部分用来存放系统的Vivi:第二部分用来存放Vivi以及Linux操作系统的启动参数;第三部分用来存放嵌入式Linux操作系统;最后一部分用来存放文件系统。具体的地址及块大小分配如表1 所列。
修改完以上两项就可以对Vivi进行编译了,之后通过JTAG将生成的二进制代码烧写到Flash的第一部分,即完成了Vivi的移植。
3 内核移植
内核移植和BootLoader移植一样要根据设计的硬件平台来进行。根据本嵌入式系统硬件平台的设计,需修改内核Makefile文件、设置 Flash分区、配置与编译内核等,并完成网络设备、LCD以及USB等驱动的移植,下面简单介绍一下针对本硬件平台的相关移植工作。
(1)内核编译与移植
在交叉编译内核之前,要先对编译选项进行配置。执行“make menuconfig”指令,进人Syetem Type选项,选择对S3C2410系统板的支持,然后配置File System和Block device,接下来使用“make dep”指令设置依赖关系,之后便可以使用“make zImage”指令进行编译。编译内核交叉编译时间相对较长。最终会生成一个文件zImage,这就是编译成功后的ARM Linux内核文件。将编译好的内核镜像文件写入到Flash中,即完成了内核的移植。
(2)网络设备移植
系统中采用CS8900A作为网络芯片,最高支持10 Mb/s的传输率,它使用S3C2410的nGCS3作为片选线,IRQ_EINT9作为外部中断信号线。其驱动移植方法如下:
1)在linux/driver/net/arm目录下加入芯片的驱动程序文件CS8900.h和CS8900.c:
2)在smdk2410_init函数中完成相应寄存器设置;在CS8900_probe()函数中对S3C2410的网络控制寄存器进行设置:加入 _raw_writel(0x221ldll0,S3C2410_BWSCON);和 _raw_writel(0x1f7c,S3C2410_BANKCON3);两个语句;
3)将网卡的物理地址(0x19000000)映射到vSMDK2410_ETH_IO所指向的虚拟地址上去,即在/arch/arm/mach- S3C2410/mach-smdk2410.c文件中的smdk2410_iodesc []结构数组中添加如下内容:{vSMDK2410_ETH_IO,0x19000000,SZ_1M,MTl_DEVICE};
4)配置网络设备驱动的Makefile、Kconfig文件,并对头文件做部分修改。
(3) LCD移植
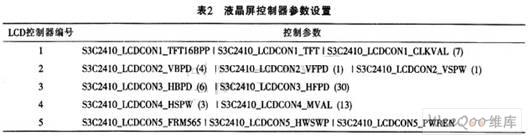
在2.6.16内核中已经包含了S3C2410的LCD驱动程序,因此,移植的主要工作是要根据驱动程序及LCD屏的实际情况进行初始化。 S3C2410自带5个LCD控制器,每个控制器有不同的功能,必需对每个控制器的参数进行相应的设置才能顺利地启动LCD,这些参数包括:液晶屏类型 (TFT屏或CSTN屏)、颜色位数、垂直度、水平度、控制信号线的极性以及液晶屏的分辨率等等。
本系统采用的是SHARP 8.0英寸的TFT液晶屏。参考该液晶屏手册,根据实际情况设置各个寄存器的参数如表2所列。
设置好液晶屏的参数后,再在平台初始化函数smdk2410_devices[]_initdata中启动液晶屏。最后,修改 drivers/video目录下的Kconfig和drivers/video目录下的Makefile文件。
本文正是在这一背景下,为基于S3C2410的嵌入式平台(扩充了多种外围设备,包括:LCD、A/D、网络芯片等等)构建出一个基于 Linux2.6.16内核的嵌入式系统开发平台,以满足风力发电监控系统开发的需求。
1系统构架
本系统的硬件平台是以32位高性能嵌入式处理器S3C2410A作为系统的CPU,其工作频率最高为203 MHz,具有强大的处理能力。另外,还扩展有多种外围设备,如:分辨率为640×480的26万色TFT液晶显示屏、串口、USB口、网口、64MB Flash、64MB SDRAM等等。可以充分满足风力发电监控系统开发的需求。
本硬件平台的软件构架主要分为以下几个部分:BSP层、操作系统层以及应用层,图1所示是其软件构架图。本系统的硬件平台是由嵌入式微处理器及其外围设备所构成的。硬件抽象层(BSP)是存储在硬件平台ROM或Flash上的负责与硬件底层交流的硬件驱动程序,主要负责对系统进行初始化,并将收集的硬件信息传递到接下来运行的操作系统内核中去。操作系统内核通过BSP来管理系统硬件资源,并为上层软件提供进程调度、内存管理、文件系统、设备驱动等服务。应用层主要负责与用户进行交流。
在完成系统的构架设计以后,就可以针对硬件平台进行具体的构建了,其工作主要包括以下几个部分:BootLoader移植、内核移植以及文件系统的建立等,其中内核移植包括网络设备、LCD和USB等驱动的移植。文中针对本系统的设计给出了相关程序的移植。
2 BootLoader移植
BootLoader (引导加载程序)是系统加电后运行的第一段代码。这段小程序用于初始化硬件设备和建立内存空间的映射图,从而将系统的软硬件环境带到一个合适的状态,以便为最终调用操作系统内核准备好正确的环境。
目前,较流行的BootLoader主要有U-boot和Vivi等。本设计主要是以S3C2410为控制器的硬件平台,因此可以选用带有网络功能的 Vivi作为系统的BootLoader。作为引导程序的Vivi一般分为stage1和stage2两大部分。stage1主要是根据CPU的体系结构进行设备初始化等工作,通常都用短小精悍的汇编语言来实现,而stage2则通常用C语言来实现,这样可以实现更加复杂的功能,且代码会具有更好的可读性和可移植性。为了使Vivi更适合本系统的硬件平台,设计时需要对其进行部分修改。
(1)修改编译器
首先要把Vivi中Makefile的有关编译的选项指向安装好的3.4.1版本的交叉编译工具链,将编译所需的Linux文件夹“UNUX- INCLUDE-DIR=”指向交叉编译器所在的文件夹“LINUX-INCLUDE- DIR=/usr/local/arm/3.4.1/include”,并将“CROSS-COMPILE=”项修改为“CROSS- COMPILE=/usr/local/arm/3.4.1/bin/arm-linux-”。
(2)修改启动参数
接着根据硬件平台的实际情况要修改Vivi中Flash分块情况。本系统将Flash划分成四个部分:第一部分用来存放系统的Vivi:第二部分用来存放Vivi以及Linux操作系统的启动参数;第三部分用来存放嵌入式Linux操作系统;最后一部分用来存放文件系统。具体的地址及块大小分配如表1 所列。
修改完以上两项就可以对Vivi进行编译了,之后通过JTAG将生成的二进制代码烧写到Flash的第一部分,即完成了Vivi的移植。
3 内核移植
内核移植和BootLoader移植一样要根据设计的硬件平台来进行。根据本嵌入式系统硬件平台的设计,需修改内核Makefile文件、设置 Flash分区、配置与编译内核等,并完成网络设备、LCD以及USB等驱动的移植,下面简单介绍一下针对本硬件平台的相关移植工作。
(1)内核编译与移植
在交叉编译内核之前,要先对编译选项进行配置。执行“make menuconfig”指令,进人Syetem Type选项,选择对S3C2410系统板的支持,然后配置File System和Block device,接下来使用“make dep”指令设置依赖关系,之后便可以使用“make zImage”指令进行编译。编译内核交叉编译时间相对较长。最终会生成一个文件zImage,这就是编译成功后的ARM Linux内核文件。将编译好的内核镜像文件写入到Flash中,即完成了内核的移植。
(2)网络设备移植
系统中采用CS8900A作为网络芯片,最高支持10 Mb/s的传输率,它使用S3C2410的nGCS3作为片选线,IRQ_EINT9作为外部中断信号线。其驱动移植方法如下:
1)在linux/driver/net/arm目录下加入芯片的驱动程序文件CS8900.h和CS8900.c:
2)在smdk2410_init函数中完成相应寄存器设置;在CS8900_probe()函数中对S3C2410的网络控制寄存器进行设置:加入 _raw_writel(0x221ldll0,S3C2410_BWSCON);和 _raw_writel(0x1f7c,S3C2410_BANKCON3);两个语句;
3)将网卡的物理地址(0x19000000)映射到vSMDK2410_ETH_IO所指向的虚拟地址上去,即在/arch/arm/mach- S3C2410/mach-smdk2410.c文件中的smdk2410_iodesc []结构数组中添加如下内容:{vSMDK2410_ETH_IO,0x19000000,SZ_1M,MTl_DEVICE};
4)配置网络设备驱动的Makefile、Kconfig文件,并对头文件做部分修改。
(3) LCD移植
在2.6.16内核中已经包含了S3C2410的LCD驱动程序,因此,移植的主要工作是要根据驱动程序及LCD屏的实际情况进行初始化。 S3C2410自带5个LCD控制器,每个控制器有不同的功能,必需对每个控制器的参数进行相应的设置才能顺利地启动LCD,这些参数包括:液晶屏类型 (TFT屏或CSTN屏)、颜色位数、垂直度、水平度、控制信号线的极性以及液晶屏的分辨率等等。
本系统采用的是SHARP 8.0英寸的TFT液晶屏。参考该液晶屏手册,根据实际情况设置各个寄存器的参数如表2所列。
设置好液晶屏的参数后,再在平台初始化函数smdk2410_devices[]_initdata中启动液晶屏。最后,修改 drivers/video目录下的Kconfig和drivers/video目录下的Makefile文件。
嵌入式 Linux S3C2410 LCD USB C语言 ARM 单片机 电子 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于FPGA安全封装的身份认证模型研究(05-27)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 智能视频多媒体技术的应用(05-31)