TPYBoard读取芯片上的温度传感器
时间:09-21
来源:互联网
点击:
转载请以链接形式注明文章来源,公众号:MicroPython玩家汇
一、STM32内部温度传感器概要
STM32芯片内部一项独特的功能就是内部集成了一个温度传感器,因为是内置,所以测试的是芯片内部的温度,如果芯片外接负载一定的情况下,那么芯片的发热也基本稳定,相对于外界的温度而言,这个偏差值也是基本稳定的.也就是说用STM32内部传感器来测量外界环境的温度。
在一些恶劣的应用环境下面,可以通过检测芯片内部而感知设备的工作环境温度,如果温度过高或者过低了则马上睡眠或者停止运转.可以保证您的设备工作的可靠性。
目前我国的北斗导航定位系统已经比较成熟,北斗导航应用的范围越来越广,正是基于这个时代大背景下做出一块利用北斗系统定位的开发板,可以方便演示定位系统,提高北斗智慧的技术技能,让更多的人了解北斗智慧以及北斗导航相关知识和开发北斗相关产品方向。
二、STM32内部温度传感器参数
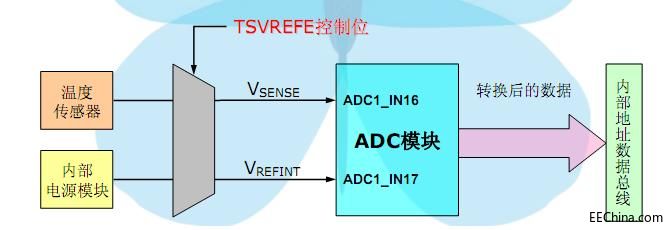
1.STM32内部温度传感器与ADC的通道16相连,与ADC配合使用实现温度测量;
2.测量范围–40~125℃,精度±1.5℃。
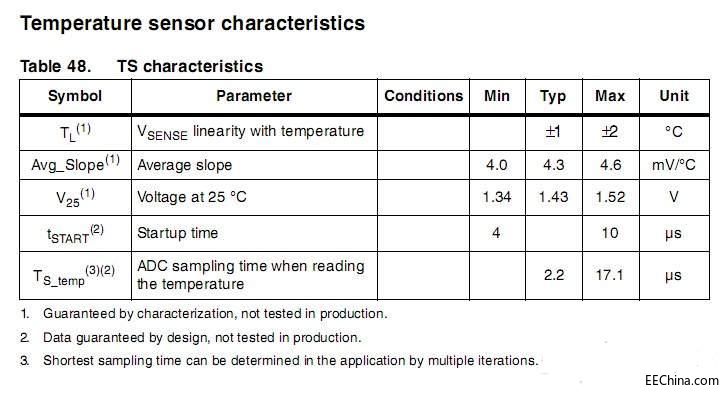
3.温度传感器产生一个随温度线性变化的电压,转换范围在2V<VDDA<3.6V之间。转换公式如下图所示:
手册中对于公式中的参数说明:
三、读取温度的实现原理
写代码的时候,在测量要求不怎么高的情况下,公式可以简化。简化的公式:
Temperature=(1.42-ADC_Value*3.3/4096)*1000/4.35+25
程序编写:
1.初始化ADC,初始化DMA
注意:内部温度传感器是使用了ADC1的第16通道哦.
2.ADC_TempSensorVrefintCmd(ENABLE);
使能温度传感器和内部参考电压通道
3.按照刚才列出的公式计算
Temperature=(1.42-ADC_Value*3.3/4096)*1000/4.35+25;
四、TPYBoard读取温度例程
一、STM32内部温度传感器概要
STM32芯片内部一项独特的功能就是内部集成了一个温度传感器,因为是内置,所以测试的是芯片内部的温度,如果芯片外接负载一定的情况下,那么芯片的发热也基本稳定,相对于外界的温度而言,这个偏差值也是基本稳定的.也就是说用STM32内部传感器来测量外界环境的温度。
在一些恶劣的应用环境下面,可以通过检测芯片内部而感知设备的工作环境温度,如果温度过高或者过低了则马上睡眠或者停止运转.可以保证您的设备工作的可靠性。
目前我国的北斗导航定位系统已经比较成熟,北斗导航应用的范围越来越广,正是基于这个时代大背景下做出一块利用北斗系统定位的开发板,可以方便演示定位系统,提高北斗智慧的技术技能,让更多的人了解北斗智慧以及北斗导航相关知识和开发北斗相关产品方向。
二、STM32内部温度传感器参数
1.STM32内部温度传感器与ADC的通道16相连,与ADC配合使用实现温度测量;
2.测量范围–40~125℃,精度±1.5℃。
3.温度传感器产生一个随温度线性变化的电压,转换范围在2V<VDDA<3.6V之间。转换公式如下图所示:

手册中对于公式中的参数说明:
三、读取温度的实现原理
写代码的时候,在测量要求不怎么高的情况下,公式可以简化。简化的公式:
Temperature=(1.42-ADC_Value*3.3/4096)*1000/4.35+25
程序编写:
1.初始化ADC,初始化DMA
注意:内部温度传感器是使用了ADC1的第16通道哦.
2.ADC_TempSensorVrefintCmd(ENABLE);
使能温度传感器和内部参考电压通道
3.按照刚才列出的公式计算
Temperature=(1.42-ADC_Value*3.3/4096)*1000/4.35+25;
四、TPYBoard读取温度例程
- # main.py -- put your code here!
- import pyb
- import time
- import stm
- from pyb import Pin
- def adcread(chan): # 16 temp 17 vbat 18 vref
- assert chan >= 16 and chan <= 18, 'Invalid ADC channel'
- start = pyb.millis()
- timeout = 100
- stm.mem32[stm.RCC + stm.RCC_APB2ENR] |= 0x100 # enable ADC1 clock.0x4100
- stm.mem32[stm.ADC1 + stm.ADC_CR2] = 1 # Turn on ADC
- stm.mem32[stm.ADC1 + stm.ADC_CR1] = 0 # 12 bit
- if chan == 17:
- stm.mem32[stm.ADC1 + stm.ADC_SMPR1] = 0x200000 # 15 cycles
- stm.mem32[stm.ADC + 4] = 1 << 23
- elif chan == 18:
- stm.mem32[stm.ADC1 + stm.ADC_SMPR1] = 0x1000000
- stm.mem32[stm.ADC + 4] = 0xc00000
- else:
- stm.mem32[stm.ADC1 + stm.ADC_SMPR1] = 0x40000
- stm.mem32[stm.ADC + 4] = 1 << 23
- stm.mem32[stm.ADC1 + stm.ADC_SQR3] = chan
- stm.mem32[stm.ADC1 + stm.ADC_CR2] = 1 | (1 << 30) | (1 << 10) # start conversion
- while not stm.mem32[stm.ADC1 + stm.ADC_SR] & 2: # wait for EOC
- if pyb.elapsed_millis(start) > timeout:
- raise OSError('ADC timout')
- data = stm.mem32[stm.ADC1 + stm.ADC_DR] # clear down EOC
- stm.mem32[stm.ADC1 + stm.ADC_CR2] = 0 # Turn off ADC
- return data
- def v33():
- return 4096 * 1.21 / adcread(17)
- def vbat():
- return 1.21 * 2 * adcread(18) / adcread(17) # 2:1 divider on Vbat channel
- def vref():
- return 3.3 * adcread(17) / 4096
- def temperature():
- return 25 + 400 * (3.3 * adcread(1
STM32 传感器 温度传感器 ADC 电压 LED 相关文章:
- STM32-FSMC机制的NOR Flash存储器扩展技术(11-20)
- 基于Cortex-M3的 STM32微控制器处理先进电机控制方法(11-23)
- 基于STM32控制的声音导引系统(01-16)
- 基于Cortex-M3的STM32微控制器处理先进电机控制方法(03-07)
- 基于STM32的嵌入式语音识别模块设计(03-29)
- 新一代嵌入式微处理器STM32F103开发与应用(05-08)