基于DSP的伺服运动控制器研究与开发
时间:11-27
来源:互联网
点击:
3 速度、加速度前馈PID控制算法
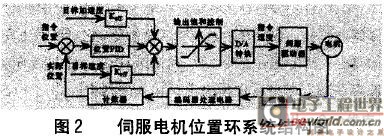
本控制器采用典型的三环调节,其中速度调节器和电流调节器的功能由伺服电机驱动器完成,电流环用来提高系统的动态响应指标,增强系统抗干扰能力;速度环用于调节伺服电机的转速。位置闭环调节原理框图如图2所示,它包括位置PID调节和速度、加速度前馈,由运动控制器底层程序完成,用于实现精确定位、回零等,输出饱和控制可保证输出电压不会超过设定范围。
位置环的计算公式为:
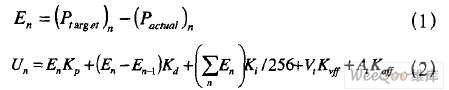
其中En为第n个采样时刻的位置误差;Ptarget为第n个采样时刻的目标位置;Pactral为第n个采样时刻的实际位置,Un为位置环输出速度指令电压;为第n个采样时刻的累积误差值;Vt为当前目标速度;Kvff为速度前馈增益;At为当前目标加速度;Kvff为加速度前馈增益;Kp、Ki、Kd分别为比例、微分和积分增益。
4 Matlab仿真及结果分析
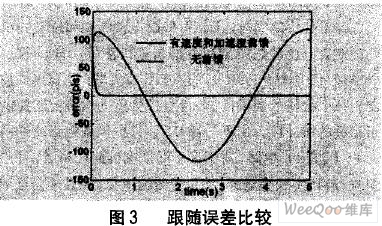
基于KLD-200二维数控平台进行仿真。平台由两个Panasonic公司的MSMA012A 1E伺服电机及配套的MSDA013A1A驱动器进行控制。电机最高转速为3000RPM,功率1 00W,增量式编码器,2500P/r,丝杠导程为4mm/r。取Kp=100、Ki=12、Kd=2进行仿真。Y轴电机速度曲线与余弦曲线类似,跟随误差曲线如图3所示。无前馈情况下电机跟随误差从开始的63个脉冲在0.137秒后上升到114个脉冲,随后作类似余弦曲线的变化。引入前馈后,跟随误差从开始的63个脉冲迅速上升到109个脉冲,然后逐渐下降,在大约0.2秒后稳定在±2个脉冲之间。可见,速度和加速度前馈大大减小了系统的跟随误差。利用自己开发的运动控制器对数控平台反复进行控制实验,效果良好。梯形曲线控制实验中,设定加速度为10rev/s2,目标速度300RPM,位移120mm。到达目标速度后,驱动器显示的电机速度波动范围在±2RPM之间。利用VC的OnTimer()函数实时获取位置信息并进行显示,可以看出,到位后的最大超调量约为5~10个脉冲,稳态误差在±2个脉冲之内,小于1mm。
5 结束语
本运动控制采用基于DSP和CPLD的硬件方案充分发挥了DSP芯片实时高效的处理能力,系统设计合理,可以实现变传动比的电子齿轮和多轴插补功能。控制器采用了基于速度和加速度前馈的PID调节和NURBS插补等先进理论,实验和仿真结果表明,该运动控制器实时性好,控制精确度高,跟随误差小,理论跟随误差小于2个脉冲,位置控制误差小于1mm,可以满足高速高精度加工的要求。
本控制器采用典型的三环调节,其中速度调节器和电流调节器的功能由伺服电机驱动器完成,电流环用来提高系统的动态响应指标,增强系统抗干扰能力;速度环用于调节伺服电机的转速。位置闭环调节原理框图如图2所示,它包括位置PID调节和速度、加速度前馈,由运动控制器底层程序完成,用于实现精确定位、回零等,输出饱和控制可保证输出电压不会超过设定范围。
位置环的计算公式为:
其中En为第n个采样时刻的位置误差;Ptarget为第n个采样时刻的目标位置;Pactral为第n个采样时刻的实际位置,Un为位置环输出速度指令电压;为第n个采样时刻的累积误差值;Vt为当前目标速度;Kvff为速度前馈增益;At为当前目标加速度;Kvff为加速度前馈增益;Kp、Ki、Kd分别为比例、微分和积分增益。
4 Matlab仿真及结果分析
基于KLD-200二维数控平台进行仿真。平台由两个Panasonic公司的MSMA012A 1E伺服电机及配套的MSDA013A1A驱动器进行控制。电机最高转速为3000RPM,功率1 00W,增量式编码器,2500P/r,丝杠导程为4mm/r。取Kp=100、Ki=12、Kd=2进行仿真。Y轴电机速度曲线与余弦曲线类似,跟随误差曲线如图3所示。无前馈情况下电机跟随误差从开始的63个脉冲在0.137秒后上升到114个脉冲,随后作类似余弦曲线的变化。引入前馈后,跟随误差从开始的63个脉冲迅速上升到109个脉冲,然后逐渐下降,在大约0.2秒后稳定在±2个脉冲之间。可见,速度和加速度前馈大大减小了系统的跟随误差。利用自己开发的运动控制器对数控平台反复进行控制实验,效果良好。梯形曲线控制实验中,设定加速度为10rev/s2,目标速度300RPM,位移120mm。到达目标速度后,驱动器显示的电机速度波动范围在±2RPM之间。利用VC的OnTimer()函数实时获取位置信息并进行显示,可以看出,到位后的最大超调量约为5~10个脉冲,稳态误差在±2个脉冲之内,小于1mm。
5 结束语
本运动控制采用基于DSP和CPLD的硬件方案充分发挥了DSP芯片实时高效的处理能力,系统设计合理,可以实现变传动比的电子齿轮和多轴插补功能。控制器采用了基于速度和加速度前馈的PID调节和NURBS插补等先进理论,实验和仿真结果表明,该运动控制器实时性好,控制精确度高,跟随误差小,理论跟随误差小于2个脉冲,位置控制误差小于1mm,可以满足高速高精度加工的要求。
机器人 集成电路 电子 单片机 DSP CPLD USB 总线 编码器 LTE 电路 电压 DAC 电流 仿真 相关文章:
- 基于气动人工肌肉的双足机器人关节设计(02-07)
- 基于ARM9的仿人机器人分布式控制系统(11-27)
- 基于MCS-51单片机的智能机器人迷宫车设计(04-20)
- 基于AVR单片机的灭火机器人设计与实现(06-13)
- 基于CANopen协议的救援机器人调试系统(08-16)
- 基于STM32F的搬运机器人电机控制系统的设计与实现(04-05)