基于DSP的孤立词语音识别系统的设计
时间:11-26
来源:互联网
点击:
1 引言
随着语音信号处理技术的不断发展与成熟,语音识别正逐步成为信息技术中人机接口的关键技术。DSP芯片,即数字信号处理器,是专门为快速实现各种信号处理算法而设计的、具有特殊结构的微处理器,其处理速度比最快的CPU还快10"50倍。本文介绍的就是基于TMS320VC5402配合TLC320AD50C和AT89S52的实验室用机器人的孤立词语音识别系统。
2 语音识别系统的基本介绍
2.1 语音识别系统的组成
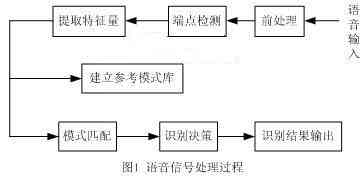
计算机语音识别过程与人对语音识别处理过程基本上是一致的。语音信号本身的特点造成了语音识别的困难。这些特点包括多变性,动态性,瞬时性和连续性等。目前主流的语音识别技术是基于统计模式识别的基本理论。一个完整的语音识别系统可如图1所示。
2.2 语音识别系统的分类
根据对说话人说话方式的要求,可以分为孤立词语音识别系统,连续字语音识别系统和连续语音识别系统;根据对说话人的依赖程度可以分为特定人和非特定人语音识别系统;根据词汇量大小,可以分为小词汇量、中等词汇量、大词汇量以及无限词汇量语音识别系统。
3 硬件系统设计
此语音识别系统的目的让机器人能听懂我们所发出的简单的命令,首先由TLC320AD50C采集计算机声卡的语音,经过转换后送给TMS320VC5402, TMS320VC5402完成语音信号处理,即识别出所发出的语音,然后把结果送给AT89S52显示,同时通过串行通讯送给机器人(PC-104),以使机器人能够控制自己的行动。其结构框图如图2所示。
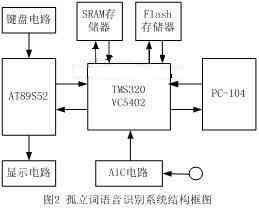
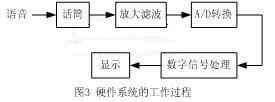
该系统以TMS320VC5402为核心电路,对孤立词语音信号进行采集和处理,AIC为TMS320VC5402的模拟接口电路,包括放大、滤波、和A/D转换的电路,把由话筒采集进来的模拟语音信号,转换成数字语音信号。其中SRAM和Flash分别为TMS 320VC5402的数据存储器和程序存储器。键盘和显示部分则由AT89S52来控制,AT89S52把键盘操作转换为控制信号再传送给TMS320VC5402,控制系统的工作是训练还是识别,TMS320VC5402把要显示的系统状态通讯给AT89S52,以实现LCD显示。这些硬件工作过程如图3所示。
3.1 TMS320VC5402与TLC320AD50C的接口设计
TMS320VC5402提供了两个增强型的高速、全双工多通道缓存串行口McBSP, McBSP具有全双工的通信机制以及双缓存的发送寄存器和三缓存的接收寄存器,允许连续的数据流传输,数据长度可以为8,12,16,20,24,32;同时还提供了A-律和μ律压扩,多达128个通道的发送与接收。McBSP通过7个引脚使得一个数据通路和一个控制通路与外部设备相连。McBSP的引脚如下:
① DX:发送引脚,与McBSP相连发送数据。
② DR:接收引脚,与接收数据总线相连。
③ CLKX:发送时钟引脚。
④ CLKR:接收时钟引脚。
⑤ FSX:发送帧同步引脚。
⑥ FSR:接收帧同步引脚。
TLC320AD50C集成了16位A/D,D/A转换器,采样速率最高可达80kHz。在TLC320AD50C内部DAC之前有插值滤波器,ADC之后有抽样滤波器,接收和发送可同时进行。TLC320AD50C主机时钟信号来源于外部,通过MCLK引脚输人。帧同步信号从内部产生,由MCLK导出,其频率由控制寄存器4设定。SCLK时钟可以由内部产生也可由外部插入,在内部产生时,其频率为帧同步信号频率的256倍。其主要特点如下:
① 可采用单5V电源供电也可以采用5V模拟、3.3V数字双电源供电;
② 内含16位精度的Σ-△ADC和DAC;
③ 器件中的ADC为64倍过采样,DAC为256倍过采样(内部);
④ 具有85dB的最小信噪比;
⑤ 带有内建抗混叠滤波器和sinx/x补偿;
⑥ 可配置成主机或从机方式,一个串行接口可支持4个TLC320AD50器件;
TLC320AD50C与TMS320VC5402串行通信可以分为首次通信和二次通信。在首次通信中,有两种数据传送模式,16位传送模式和15+1位传送模式,可通过控制寄存器设定。省却情况下为15+1位传送模式。
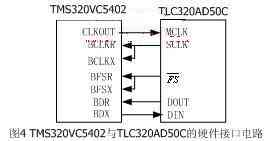
TMS320VC5402与TLC320AD50C的硬件接口电路如图4所示。
3.2 TMS320VC5402与AT89S52的通信
AT89S52和TMS320VC5402各自独立工作,其信息和数据交换通过共享一片外部存储器来实现,它们之间信号联络通过硬连接和软件判断来实现。
外部存储器采用的是CY7C133,它是高速的2K X 16bit的静态异步双端口RAM,其存储速度为25ns。它有两套独立的地址线、数据线和控制信号线,允许两个控制器件中的数据通过共同连接的存储器来进行通信。该双端口RAM允许两个控制器同时读取任何存储单元(包括同时读同一单元),但不允许同时写或者一读一写统一地址单元。
对于TMS320VC5402,数据存储器CY7C133的对应地址为4000H"47FFH。
对于AT89S52,数据存储器CY7C133的对应地址为2000H"27FFH。
随着语音信号处理技术的不断发展与成熟,语音识别正逐步成为信息技术中人机接口的关键技术。DSP芯片,即数字信号处理器,是专门为快速实现各种信号处理算法而设计的、具有特殊结构的微处理器,其处理速度比最快的CPU还快10"50倍。本文介绍的就是基于TMS320VC5402配合TLC320AD50C和AT89S52的实验室用机器人的孤立词语音识别系统。
2 语音识别系统的基本介绍
2.1 语音识别系统的组成
计算机语音识别过程与人对语音识别处理过程基本上是一致的。语音信号本身的特点造成了语音识别的困难。这些特点包括多变性,动态性,瞬时性和连续性等。目前主流的语音识别技术是基于统计模式识别的基本理论。一个完整的语音识别系统可如图1所示。
2.2 语音识别系统的分类
根据对说话人说话方式的要求,可以分为孤立词语音识别系统,连续字语音识别系统和连续语音识别系统;根据对说话人的依赖程度可以分为特定人和非特定人语音识别系统;根据词汇量大小,可以分为小词汇量、中等词汇量、大词汇量以及无限词汇量语音识别系统。
3 硬件系统设计
此语音识别系统的目的让机器人能听懂我们所发出的简单的命令,首先由TLC320AD50C采集计算机声卡的语音,经过转换后送给TMS320VC5402, TMS320VC5402完成语音信号处理,即识别出所发出的语音,然后把结果送给AT89S52显示,同时通过串行通讯送给机器人(PC-104),以使机器人能够控制自己的行动。其结构框图如图2所示。
该系统以TMS320VC5402为核心电路,对孤立词语音信号进行采集和处理,AIC为TMS320VC5402的模拟接口电路,包括放大、滤波、和A/D转换的电路,把由话筒采集进来的模拟语音信号,转换成数字语音信号。其中SRAM和Flash分别为TMS 320VC5402的数据存储器和程序存储器。键盘和显示部分则由AT89S52来控制,AT89S52把键盘操作转换为控制信号再传送给TMS320VC5402,控制系统的工作是训练还是识别,TMS320VC5402把要显示的系统状态通讯给AT89S52,以实现LCD显示。这些硬件工作过程如图3所示。
3.1 TMS320VC5402与TLC320AD50C的接口设计
TMS320VC5402提供了两个增强型的高速、全双工多通道缓存串行口McBSP, McBSP具有全双工的通信机制以及双缓存的发送寄存器和三缓存的接收寄存器,允许连续的数据流传输,数据长度可以为8,12,16,20,24,32;同时还提供了A-律和μ律压扩,多达128个通道的发送与接收。McBSP通过7个引脚使得一个数据通路和一个控制通路与外部设备相连。McBSP的引脚如下:
① DX:发送引脚,与McBSP相连发送数据。
② DR:接收引脚,与接收数据总线相连。
③ CLKX:发送时钟引脚。
④ CLKR:接收时钟引脚。
⑤ FSX:发送帧同步引脚。
⑥ FSR:接收帧同步引脚。
TLC320AD50C集成了16位A/D,D/A转换器,采样速率最高可达80kHz。在TLC320AD50C内部DAC之前有插值滤波器,ADC之后有抽样滤波器,接收和发送可同时进行。TLC320AD50C主机时钟信号来源于外部,通过MCLK引脚输人。帧同步信号从内部产生,由MCLK导出,其频率由控制寄存器4设定。SCLK时钟可以由内部产生也可由外部插入,在内部产生时,其频率为帧同步信号频率的256倍。其主要特点如下:
① 可采用单5V电源供电也可以采用5V模拟、3.3V数字双电源供电;
② 内含16位精度的Σ-△ADC和DAC;
③ 器件中的ADC为64倍过采样,DAC为256倍过采样(内部);
④ 具有85dB的最小信噪比;
⑤ 带有内建抗混叠滤波器和sinx/x补偿;
⑥ 可配置成主机或从机方式,一个串行接口可支持4个TLC320AD50器件;
TLC320AD50C与TMS320VC5402串行通信可以分为首次通信和二次通信。在首次通信中,有两种数据传送模式,16位传送模式和15+1位传送模式,可通过控制寄存器设定。省却情况下为15+1位传送模式。
TMS320VC5402与TLC320AD50C的硬件接口电路如图4所示。
3.2 TMS320VC5402与AT89S52的通信
AT89S52和TMS320VC5402各自独立工作,其信息和数据交换通过共享一片外部存储器来实现,它们之间信号联络通过硬连接和软件判断来实现。
外部存储器采用的是CY7C133,它是高速的2K X 16bit的静态异步双端口RAM,其存储速度为25ns。它有两套独立的地址线、数据线和控制信号线,允许两个控制器件中的数据通过共同连接的存储器来进行通信。该双端口RAM允许两个控制器同时读取任何存储单元(包括同时读同一单元),但不允许同时写或者一读一写统一地址单元。
对于TMS320VC5402,数据存储器CY7C133的对应地址为4000H"47FFH。
对于AT89S52,数据存储器CY7C133的对应地址为2000H"27FFH。
DSP 机器人 电路 LCD 总线 DAC 滤波器 ADC 智能机器人 单片机 相关文章:
- F1aSh存储器在TMS320C3X系统中的应用(11-11)
- 基于PIC18F系列单片机的嵌入式系统设计(11-19)
- DSP在卫星测控多波束系统中的应用(01-25)
- 基于PCI总线的双DSP系统及WDM驱动程序设计(01-26)
- 利用Virtex-5 FPGA实现更高性能的方法(03-08)
- DSP与单片机通信的多种方案设计(03-08)