基于ARM9的多传感器数据融合火灾报警系统
时间:11-04
来源:互联网
点击:
4 火灾监测的数据融合试验
本设计对火灾监测使用了温度传感器,可燃气体探测器的烟雾探测器,数据融合的方法如图3。

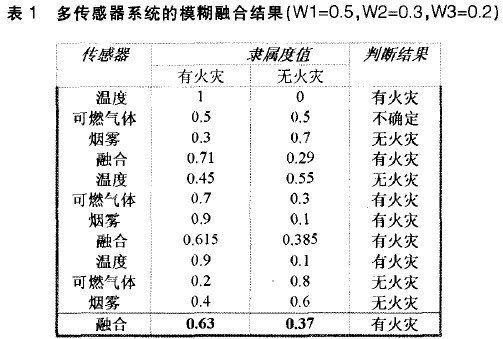
图3基于模糊推理的数据融合的一般方法是在火灾故障监测系统中,首先确定各个传感器的权重,在设计中我们设定温度传感器,可燃气体探测器的权重分别为W1=0.5,W2=0.3,W3=0.2;将最后的判决结果分为两种:有火灾Y1和无火灾Y2;根据当前的工作状态,确定每个传感器X对于每一判决Y的隶属函数;再进行线性变换运算,即可确定最后的结果。
比如,在某时刻,根据温度传感器的数据确定有无火灾的隶属度分别为μ11=0.45,μ12=0.55,根据烟雾传感器的数据确定有无火灾的隶属度分别为μ31=0.9,μ32=0.1,采用线性变换运算得Y,

根据结果得有火灾隐患,应该启动气溶灭火器。表1是模糊融合在火灾故障监测系统中的试验数据。
5 结束语
将模糊推理数据融合方法应用到多传感器的电缆火灾故障监测系统,与单一的传感器相比,具有更高的准确性的可信度。运行结果表明,这种方法对提高火灾故障检测的可靠性是实用和有效的,可降低火灾报警的误报率。但是,这种方法也有一些缺点,比如传感器的权重和每一传感器对判决的隶属度值的分配方面,没有形成统一的理论,需要依靠经验进行设置。
本设计对火灾监测使用了温度传感器,可燃气体探测器的烟雾探测器,数据融合的方法如图3。
图3基于模糊推理的数据融合的一般方法是在火灾故障监测系统中,首先确定各个传感器的权重,在设计中我们设定温度传感器,可燃气体探测器的权重分别为W1=0.5,W2=0.3,W3=0.2;将最后的判决结果分为两种:有火灾Y1和无火灾Y2;根据当前的工作状态,确定每个传感器X对于每一判决Y的隶属函数;再进行线性变换运算,即可确定最后的结果。
比如,在某时刻,根据温度传感器的数据确定有无火灾的隶属度分别为μ11=0.45,μ12=0.55,根据烟雾传感器的数据确定有无火灾的隶属度分别为μ31=0.9,μ32=0.1,采用线性变换运算得Y,
根据结果得有火灾隐患,应该启动气溶灭火器。表1是模糊融合在火灾故障监测系统中的试验数据。
5 结束语
将模糊推理数据融合方法应用到多传感器的电缆火灾故障监测系统,与单一的传感器相比,具有更高的准确性的可信度。运行结果表明,这种方法对提高火灾故障检测的可靠性是实用和有效的,可降低火灾报警的误报率。但是,这种方法也有一些缺点,比如传感器的权重和每一传感器对判决的隶属度值的分配方面,没有形成统一的理论,需要依靠经验进行设置。
传感器 ARM 嵌入式 电路 电源模块 温度传感器 红外 总线 电源管理 电压 集成电路 ADC 单片机 C语言 神经网络 相关文章:
- 基于单片机的倾角测量系统设计 (06-27)
- 由MSP430和CC1100构成的无线传感器网络(08-01)
- 无线传感器网络自组网协议的实现方法(08-01)
- 基于SOC/IP的智能传感器设计研究(09-08)
- 单开关实现小型微处理器系统的双功能(08-10)
- 六大特点助CMOS图像传感器席卷医疗电子应用(11-13)