基于单片机AT89C51的时间/位移换向控制器设计
时间:06-13
来源:互联网
点击:
在实际生产过程中,常常要用到具有自动换向功能的控制部件,如机械加工中的往返运行(位移),直流电源的正反向输出,电动机的正反转运行等现象,都是当正向(或反向)运行到一定时间或一定位置时,自动换为反向(或正向)运行,周而复始的过程。实现这一过程的自动化,就是设计一套控制电路,再配以位移传感器或时间继电器。目前市场现有的时间继电器虽然可以用多个组合来满足一些使用场合的要求,但仍存在着重复计时误差大,稳定可靠运行性不高,使用不方便灵活等问题。为此,笔者研发了以单片机为核心组成的时间/位移换向控制器SWHX-1,该系统具有成本低等特点,可完全且克服以上不足。
电路组成及工作原理
SWHX-1的内部电路如图1所示。该系统分为输入输出电信号转换、CPU 软件编程控制和定时延时设定三部分,整个电路共有14条引出线,其中2、3、4脚为直流地线公共端VGND。该器件可用交直流两种供电方式工作。当用交流供电时,通过引脚13、14输入交流12 V,经桥式整流、稳压后供给内部电路恒压基准电源,并将整流后的直流12 V经引脚1、2、3、4送出,以供外部其它电路使用;当用直流供电时,引脚1、2、3、4则变为输入端,输入的12V直流电压经稳压后再供给内部电路,该方式可省去交流电源,但要注意将引脚14、13置于悬空状态。
SWHX-1内部电路设计有1路换向延时和2路定时输出,换向延时时间是指正向(或反向)输出组被关断后延时一段时间后才开通反向(或正)组工作的时间,用户可在0.5~2s之间任意设定;2路定时时间分别是指正向和反向组输出的工作时间,用户可在1m~7h31m之间任意设定。若1m~7h31m 的定时时间不能满足使用要求时,另留有4个端口P1~P4,可外接4个时间继电器或4个行程开关以弥补。Pl和P3为正向组,P2和P4为反向组。
◇ 延时时间的设定
(1)延时时间设定法
图1中t0~t4为换向延时时间设定短接开关,t0为对地公共端,t1~t4分别与0.5 s、1 s、1.5 s、2 s相对应,二者短接时,通过CPU软件编程可实现相应的换向延时。例如t0与t1短接时,延时为0.5 s;t0与t3短接时,延时为1.5 s。
(2) 定时时间设定法
图1中的S1和S2为8位定时时间设定拨位开关,每个开关前三位为小时位,后5位为分钟位,采用二进制编码方式,当8位拨码选定后,通过CPU的P1和P2口送入,经软件编程控制,实现相应的定时功能。所以每路的定时时间可在1m一7h31m之间任意设定。
◇ 定时换向器的工作原理
当SWHX一1用做定时换向控制时,CPU首先读入拨位开关S的定时设定值,经软件编程识别并通过CPU内部定时器和软件延时实现,当定时时间到后,将通过P0口经引脚12、11送出一个定时到脉冲,当引脚12、11分别与5、7脚短接时,该定时到脉冲将向CPU产生一个中断请求信号,CPU接收到这一中断请求后会通过引脚Vs1端口输出一个封锁电位信号,以停止当前正在工作的一组,并经0.5~2 s延时后,通过引脚Vs2端口输出一个启动信号,来启动另一组开始工作,从而完成一次换向工作周期。反之亦然,周而复始。
◇ 做位移换向器的工作原理
当SWHX一1用做位移换向控制时,上述定时功能将不起作用,而是将位移检测传感器(一般为行程开关)送来的“位移到”信号通过引脚5、7端口向CPU发出中断请求,当CPU接到该中断请求信号以后,则完成上述换向工作过程。另外,引脚6、8是用于位移限制的,因为绝大多数实际生产过程中的位移都是有限制的,所以将限位传感器发出的信号经端口6、8送入,CPU在接到该请求信号后,立即通过引脚9、10发出限位封锁信号,以停止位移工作。
软件设计
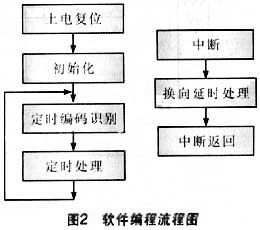
SWHX—1的软件程序分为初始化,定时识别及延时处理和中断换向处理三部分,其程序流程如图2所示。
周期换向电源应用
许多生产过程中都要用到周期性换向电源装置。这里仅以常见的电镀电源中的一种为例来说明其使用方法。图3所示为三相双反星形双向6脉波周期换向电源的电路原理图。该电源采用两套晶闸管可控硅整流电路,但在SWHX—1的控制下,在同一时间内只能有一套工作,另外一套被封锁截止。两套整流电路的工作时间可通过图1中的S1和S2来分别设定。图3中的CF97088B是双反星形6脉波晶闸管触发专用器件,它除了产生6个同步触发脉冲外,内部还具有电流、电压双P1负反馈调节功能,并且还能自动识别输入三相电中的缺相、以及过电压保护,过电流限制等功能,当有这些现象发生时,系统可自动封锁触发脉冲的输出,以起到保护和限制的目的。W1和W3分别为正反向输出电压设定值调节旋钮,而W2 和W4则分别为正反向输出电压反馈量调节旋钮。
电路组成及工作原理
SWHX-1的内部电路如图1所示。该系统分为输入输出电信号转换、CPU 软件编程控制和定时延时设定三部分,整个电路共有14条引出线,其中2、3、4脚为直流地线公共端VGND。该器件可用交直流两种供电方式工作。当用交流供电时,通过引脚13、14输入交流12 V,经桥式整流、稳压后供给内部电路恒压基准电源,并将整流后的直流12 V经引脚1、2、3、4送出,以供外部其它电路使用;当用直流供电时,引脚1、2、3、4则变为输入端,输入的12V直流电压经稳压后再供给内部电路,该方式可省去交流电源,但要注意将引脚14、13置于悬空状态。
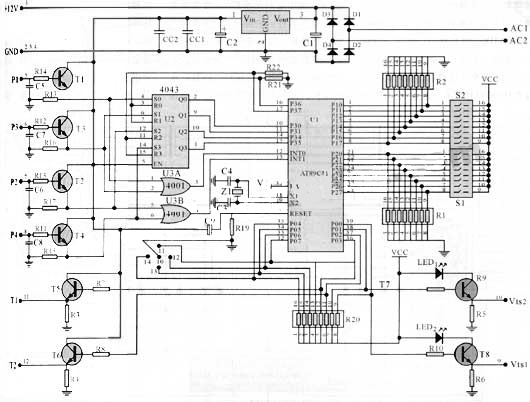 |
| 图1 时间/位移换向器电路原理图 |
SWHX-1内部电路设计有1路换向延时和2路定时输出,换向延时时间是指正向(或反向)输出组被关断后延时一段时间后才开通反向(或正)组工作的时间,用户可在0.5~2s之间任意设定;2路定时时间分别是指正向和反向组输出的工作时间,用户可在1m~7h31m之间任意设定。若1m~7h31m 的定时时间不能满足使用要求时,另留有4个端口P1~P4,可外接4个时间继电器或4个行程开关以弥补。Pl和P3为正向组,P2和P4为反向组。
◇ 延时时间的设定
(1)延时时间设定法
图1中t0~t4为换向延时时间设定短接开关,t0为对地公共端,t1~t4分别与0.5 s、1 s、1.5 s、2 s相对应,二者短接时,通过CPU软件编程可实现相应的换向延时。例如t0与t1短接时,延时为0.5 s;t0与t3短接时,延时为1.5 s。
(2) 定时时间设定法
图1中的S1和S2为8位定时时间设定拨位开关,每个开关前三位为小时位,后5位为分钟位,采用二进制编码方式,当8位拨码选定后,通过CPU的P1和P2口送入,经软件编程控制,实现相应的定时功能。所以每路的定时时间可在1m一7h31m之间任意设定。
◇ 定时换向器的工作原理
当SWHX一1用做定时换向控制时,CPU首先读入拨位开关S的定时设定值,经软件编程识别并通过CPU内部定时器和软件延时实现,当定时时间到后,将通过P0口经引脚12、11送出一个定时到脉冲,当引脚12、11分别与5、7脚短接时,该定时到脉冲将向CPU产生一个中断请求信号,CPU接收到这一中断请求后会通过引脚Vs1端口输出一个封锁电位信号,以停止当前正在工作的一组,并经0.5~2 s延时后,通过引脚Vs2端口输出一个启动信号,来启动另一组开始工作,从而完成一次换向工作周期。反之亦然,周而复始。
◇ 做位移换向器的工作原理
当SWHX一1用做位移换向控制时,上述定时功能将不起作用,而是将位移检测传感器(一般为行程开关)送来的“位移到”信号通过引脚5、7端口向CPU发出中断请求,当CPU接到该中断请求信号以后,则完成上述换向工作过程。另外,引脚6、8是用于位移限制的,因为绝大多数实际生产过程中的位移都是有限制的,所以将限位传感器发出的信号经端口6、8送入,CPU在接到该请求信号后,立即通过引脚9、10发出限位封锁信号,以停止位移工作。
软件设计
SWHX—1的软件程序分为初始化,定时识别及延时处理和中断换向处理三部分,其程序流程如图2所示。
 |
周期换向电源应用
许多生产过程中都要用到周期性换向电源装置。这里仅以常见的电镀电源中的一种为例来说明其使用方法。图3所示为三相双反星形双向6脉波周期换向电源的电路原理图。该电源采用两套晶闸管可控硅整流电路,但在SWHX—1的控制下,在同一时间内只能有一套工作,另外一套被封锁截止。两套整流电路的工作时间可通过图1中的S1和S2来分别设定。图3中的CF97088B是双反星形6脉波晶闸管触发专用器件,它除了产生6个同步触发脉冲外,内部还具有电流、电压双P1负反馈调节功能,并且还能自动识别输入三相电中的缺相、以及过电压保护,过电流限制等功能,当有这些现象发生时,系统可自动封锁触发脉冲的输出,以起到保护和限制的目的。W1和W3分别为正反向输出电压设定值调节旋钮,而W2 和W4则分别为正反向输出电压反馈量调节旋钮。
电动机 自动化 电路 传感器 继电器 单片机 电压 可控硅 电流 相关文章:
- 基于ARM微处理器LPC2132的智能电动机保护器设计(07-23)
- 基于ATmega8的大功率直流电机控制系统设计与实现(09-20)
- Atmega16在开关磁阻电机调速系统中的应用(06-08)
- DSP芯片介绍及其选型(06-07)
- 单片机在电动机保护中的应用(07-23)
- 单片机在变频调速恒压供水系统中的应用(07-23)