一种新型并条机断条光电自停装置的设计
时间:10-31
来源:互联网
点击:
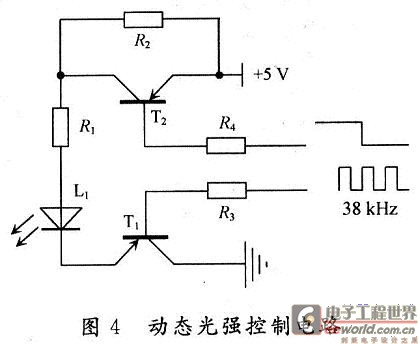
3.2 动态光强控制红外发射电路
红外线发射采用了动态可变光强设计,见图4。L1为红外发射二极管,T1,T2为PNP型三极管。当T2截止时,L1的限流电阻为R1+R2;T2饱和导通时短路R2,L1的限流电阻为R1,因此通过控制T2的导通状态可控制通过L1的工作电流大小,实现光强控制。微控器通过T1以频率为38 kHz、占空比为1/2的脉冲驱动红外发射管L1产生脉冲红外光。系统上电时微处理器控制T2截止,以小光强进行接收检测,若能够正常接收,系统将维持小光强发射进入工作状态,以提高发射器寿命。若不能正常接收,T2将导通提高发射光强,这时若能正常接收,系统将以较大光强进入工作状态,同时系统发出提示清洁透镜或调整接收器位置的信号。若仍不能正常接收,则自动关闭接收器输出,维持其他单元系统工作,并发出故障提示信号。这种设计方法,使发射与接收具有反馈应答特征,红外发射光强度得到动态控制,使接收器自动适用接收状态的变化,有利于提高检测可靠性。
3.3 自停装置单元电路原理
电路的信号处理和控制核心采用了Microchip Technology Inc.生产的PIC12C508A微处理器。它基于COMS设计,采用RISC结构,片内程序存储器EPROM和数据存储器RAM,并集成了上电复位电路(POR)、时钟振荡器(INTRC)、看门狗定时器(WDT)等功能单元。具有小型化封装(8-Lead SIOC)、低功耗(2 mA@4 MHz)、高性价比的优点,为接收器的小型化设计提供了方便。自停装置的电路设计充分利用了其内建功能,提高了集成度,降低了系统成本。
电路原理如图5所示,图中电阻R1,R2,R3,R4,红外发射二极管L1、三极管T1,T2构成发射电路,由U1的GP4,GP5口输出控制信号驱动。IRM3638、电阻R5、电容C2构成红外接收电路,R5与C1的作用是与发射电路的电源隔离,防止信号串扰,稳定IRM的供电。电阻R6。、三极管T3构成输出电路,为使各单元的输出能够采用线“或”式向自停控制器输送停车信号,采用集电极开路(OC)输出。L2为共阳极红绿双色LED,与R7,R8构成状态指示电路,由U1的GP0,GP1口驱动。正常接收时显示绿色;提醒清洁时显示橙色;输出停车信号时显示红色;接收故障时为橙色闪烁,可根据显示状态了解接收器工作情况。
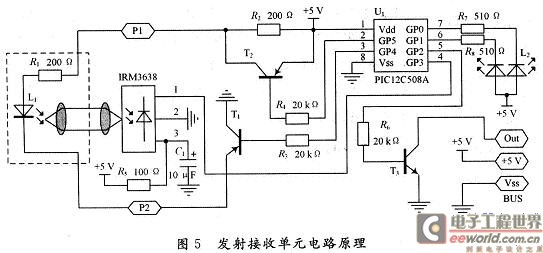
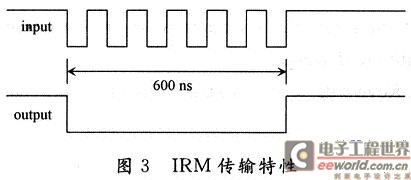
U1软件系统产生的38 kHz脉冲信号由GP4输出,经R3,T1驱动L1发射红外脉冲光信号。接收模组IRM接收到均匀间隔的连续脉冲时输出低电平,U1控制GP2处于低电平,T3处于截止状态,接收器输出电路呈高阻态。光路有棉条经过时,光路被遮挡,作用到接收器的光脉冲信号出现暂时中断,IRM输出高电平,高电平持续时间等于被遮挡时间。U1将通过GP3循环检测IRM的输出,确定是否有棉条经过光路或堵条遮挡光路。当GP3为高电平时,U1软件系统抗干扰确认后,GP2输出持续1 s的高电平,使输出电路饱和导通,向自停控制器提供停车信号。
实验证明,设备运行状态下棉条断裂下垂掠过光路的时间大于等于20 ms,微处理器软件系统对IRM的输出信号进行软件抗干扰处理,过滤高电平持续时间小于20 ms的输出脉冲,使飞花干扰得到彻底抑制。检测过程中,IRM仅用于接收并初步判断是否有棉条经过光路,其输出信号并不直接控制输出电路,而是送微处理器进一步确认。确认过程一方面能排除干扰,另一方面还对发射电路反馈控制信息,以稳定检测,避免了干扰和输出抖动,因此接收与发射在检测过程中具有反馈应答的智能化特征。
3.4 自停控制器电路原理
自停控制器电路原理参见图6,图中IO1,IO2为接口接线端子;J11,J12为断条停车继电器J1的触点输出;J21,J22为堵条停车继电器J2的触点输出;AC,AC为12 V交流电源输入端子,输入电压经全桥B1整流并经C1,C2滤波后输出直流电压VCC,为J1,J2供电;VCC电压还经三端稳压器V1稳压后为发射接收单元提供+5 V电压。IN1,+5 V,VSS为断条检测单元系统总线;IN2,+5 V,VSS为堵条检测单元系统总线。L1,L2分别为两种停车方式的动作指示LED。三极管T1与电阻R2,R3构成J1的驱动电路,二极管D1用于保护T1,驱动电路的输入端连接IN1。三极管T2与电阻R4,R5构成J2的驱动电路,二极管D2用于保护T2,驱动电路的输入端连接IN2。
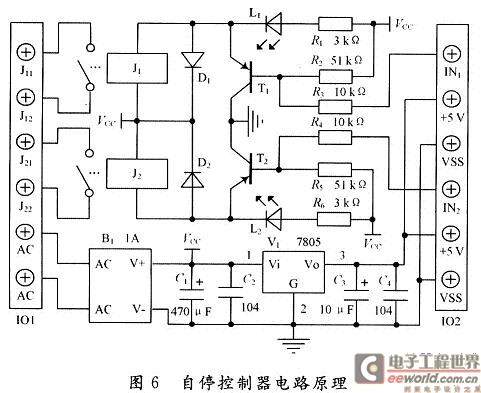
设四路断条检测单元的输出分别为OC1,OC2,OC3,OC4;两路堵条检测单元的输出分别为OC5,OC6,则断条停车的条件为:
这种线“或”的逻辑接口设计,可方便地在总线上连接多个发射与接收单元,即无论哪一路输出低电平,都会引起自停控制器输出停车控制信号,而单元之间不会产生相互影响。
4 自停装置的程序设计
PIC12C508A微控器,采用精简指令集系统,除跳转指令外绝大多数指令周期为1μs@4 MHz。为提高抗干扰能力,启用片内WDT用于程序监控。另外,用软件对输入信号进行了抗干扰处理,过滤脉冲宽度10 ms以下的输入干扰。堵条检测软件与断条检测软件基本相同,停车输出控制时间有差异,堵条停车要待故障清除才释放停车输出。
传感器 红外 二极管 放大器 三极管 电路 总线 连接器 CMOS 电阻 电流 Microchip PIC 振荡器 看门狗 电容 LED 继电器 电压 相关文章:
- 新型永磁同步电机控制芯片IRMCK203及其应用(01-16)
- AD698型LVDT信号调理电路的原理与应用(01-17)
- 带全速USB接口的PICl8F4550应用设计(04-12)
- 毫欧姆电阻在汽车电子系统中的应用(05-11)
- 利用双电机控制技术简化高能效电器设计(07-20)
- 为多路、多信号的快速扫描测量构建适当的数据采集系统(09-20)