X9241数字电位器的原理及在DSP中的应用
时间:09-13
来源:互联网
点击:
1 X9241概述
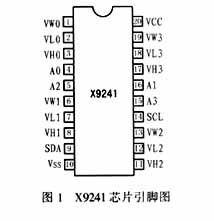
X9241是Xicor公司生产的一种集成数字电位器。它在单一芯片上集成了4个10kΩ数字电位器,每个电位器的滑动端共有64个离散的调节节点,并有4个8bit的E2PROM数据寄存器以及一个滑刷控制寄存器(WCR)。用户可以通过相应指令使电位器的WCR(滑刷控制寄存器)与某个数据寄存器相关联,也可以直接控制WCR以达到改变电位器滑动端位置的目地。X9241芯片具有I2C总线接口,可以实现寄存器映射、改变滑刷位置以及进行电位器级联等操作。X9241采用20引脚双列直插封装,其引脚排列如图1所示。其中VWi(i=0~3)为四个独立的10kΩ电位器的滑动端;VLi(i=0~3)分别为四个电位器的两个终端;A3,A2,A1,A0为X9241芯片的设备地址;SCL,SDA分别为I2C接口的串行时钟和串行数据线。X9241的工作电压为5V。
1.1 X9241的内部结构
X9241的内部结构如图2所示,从图中可以看出,一个X9241芯片内含有:I2C总线接口、SDA串行数据线、SCL串行时钟线以及4个POT(电位器)。每个POT 有4个8bit的E2PROM数据寄存器和一个WCR滑刷控制寄存器。
1.2 X9241的控制方式

需要说明的是,虽然X9241具有I2C总线接口,但由于X9241采用特殊的3字节指令结构,而普通I2C硬件都是双字节格式。因此最好采用软件模拟I2C总线时序。
1.3 X9241的主要参数
X9241的主要性能参数如下:
●SCK,SCL或其它地址输入端相对于Vss的电压为-1~+7V;
●VH或VL相对于Vss的电压范围为±8V;
●△V=|VH-VL|为16V;
●X9241工作电压范围为5V+10%。
因为VH或VL相对于VSS的电压范围是±8V,所以X9241可以不受数字电路0~+5V电源窗口的制约而广泛地应用于各种具有正负电源的模拟电路之中。
2 X9241的指令字格式
X9241的读/写指令均由三段组成(如图3所示),每段均有一个字节:第一段为从属设备地址;第二段为指令字节;第三段为数据。
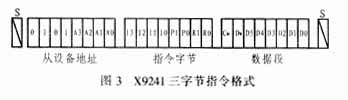

第一字段的前4位为设备类型标识,对于X9241,其固定值为0101,后4位是设备地址(A3,A2,A1,A0),这4位的0,1取值取决于芯片上的A3-A0引脚是接GND还是接VCC。
第二字段描述了操作类型和操作对象。其中前4位是指令代码I3~I0,后4位是操作对象P1、P0和R1、R0。其中P1,P0是4个电位器的选择编码,R1,R0是每个电位器的4个寄存器的选择编码。X9241的指令集如表1所列。表中的1/0表示数据为1或0,N/A为无效位。
第三字段是8bits的数据段,它的前两位CM、DW是控制位,其中CM是级联模式控制位,当CM为0时,为正常模式,当CM为1时,该电位器与序号比它高一级的电位器级联。比如,若WCR2的CM为1,表示电位器2就与电位器3级联。DW是电位器滑动端使能控制位。当DW为0时,为正常模式,当DW为1时,该电位器的滑动端失效,即滑动端处于绝缘悬浮状态。CM和DW配合使用可以实现电位器的级联,并可保证级联电位器在滑动时只有一个有效滑动端。
X9241的三字节指令序列传输示意图如图4所示,X9241还有一种递增/递减的控制方式,由于不常用,在此不再陈述。一个完整的X9241读/写时序包括以下几个部分:
(1)起始位。以SCL为高电平,SDA出现下跳沿为起始标志;
(2)传送X9241的从属设备地址字段;
(3)接收X9241返回的ACK(应答)信号,它是在SCL为高电平期间,SDA线上为低电平的状态;
(4)向X9241传送指令字段;
(5)接收X9241返回的ACK信号;
(6)如果是‘写’方式,则向X9241发送8bit数据。并接收ACK信号;如果是‘读’方式,则准备接收X9241将要返回的8bit数据,并在接收完成后,向X9241发送ACK信号;
(7)停止位。以SCL为高电平,SDA出现上跳沿为I2C传输的停止标志。

3 在TMS320F206型DSP中的应用
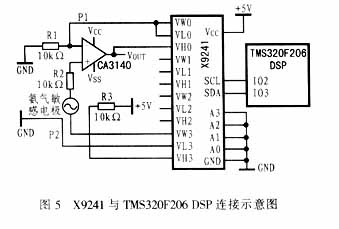
图5是笔者在氨氮传感器中使用X9241的部分电路示意图。在这个电路中,用X9241上的POT0和POT3代替原模拟电路中的两个10kΩ机械电位器来完成调整倍率和零点的任务。DSP的I/O2,I/O3分别连接到SCL和SDA端口上。该电路中,X9241的A3獳0均接地,所以它的设备地址是0000。因此在对这个芯片的电位器进行读/写操作时,第一字段应当是01010000,即50h(DSP的十六进制数)。
图6和图7分别是用IO2和IO3模拟I2C总线时,对X924进行读、写的子程序流程图。


4 结束语
使用数字电位器的主要优势是定位精度高,不受机械震动影响,并可以通过程控来实现半自动化调节。另外,由于数字电位器的VH、VL电压窗口较宽,因而能在许多场合取代机械模拟电位器。使用数字电位器的缺点是不能连续调节。由于每个数字电位器只有64档,所以对于离散多档位调节场合,用数字电位器很方便。而在需要连续调节的场合,似乎不如连续可调的模拟电位器方便。但是设计时可以采取以下方法进行补偿:
(1)多芯片级联使用,以增加有效档位;
(2)两个数字电位器配合使用,一个作为粗调,一个作为细调,两者搭配,可以得出许多种适合不同需要的组合。
X9241是Xicor公司生产的一种集成数字电位器。它在单一芯片上集成了4个10kΩ数字电位器,每个电位器的滑动端共有64个离散的调节节点,并有4个8bit的E2PROM数据寄存器以及一个滑刷控制寄存器(WCR)。用户可以通过相应指令使电位器的WCR(滑刷控制寄存器)与某个数据寄存器相关联,也可以直接控制WCR以达到改变电位器滑动端位置的目地。X9241芯片具有I2C总线接口,可以实现寄存器映射、改变滑刷位置以及进行电位器级联等操作。X9241采用20引脚双列直插封装,其引脚排列如图1所示。其中VWi(i=0~3)为四个独立的10kΩ电位器的滑动端;VLi(i=0~3)分别为四个电位器的两个终端;A3,A2,A1,A0为X9241芯片的设备地址;SCL,SDA分别为I2C接口的串行时钟和串行数据线。X9241的工作电压为5V。
1.1 X9241的内部结构
X9241的内部结构如图2所示,从图中可以看出,一个X9241芯片内含有:I2C总线接口、SDA串行数据线、SCL串行时钟线以及4个POT(电位器)。每个POT 有4个8bit的E2PROM数据寄存器和一个WCR滑刷控制寄存器。
1.2 X9241的控制方式
需要说明的是,虽然X9241具有I2C总线接口,但由于X9241采用特殊的3字节指令结构,而普通I2C硬件都是双字节格式。因此最好采用软件模拟I2C总线时序。
1.3 X9241的主要参数
X9241的主要性能参数如下:
●SCK,SCL或其它地址输入端相对于Vss的电压为-1~+7V;
●VH或VL相对于Vss的电压范围为±8V;
●△V=|VH-VL|为16V;
●X9241工作电压范围为5V+10%。
因为VH或VL相对于VSS的电压范围是±8V,所以X9241可以不受数字电路0~+5V电源窗口的制约而广泛地应用于各种具有正负电源的模拟电路之中。
2 X9241的指令字格式
X9241的读/写指令均由三段组成(如图3所示),每段均有一个字节:第一段为从属设备地址;第二段为指令字节;第三段为数据。
第一字段的前4位为设备类型标识,对于X9241,其固定值为0101,后4位是设备地址(A3,A2,A1,A0),这4位的0,1取值取决于芯片上的A3-A0引脚是接GND还是接VCC。
第二字段描述了操作类型和操作对象。其中前4位是指令代码I3~I0,后4位是操作对象P1、P0和R1、R0。其中P1,P0是4个电位器的选择编码,R1,R0是每个电位器的4个寄存器的选择编码。X9241的指令集如表1所列。表中的1/0表示数据为1或0,N/A为无效位。
第三字段是8bits的数据段,它的前两位CM、DW是控制位,其中CM是级联模式控制位,当CM为0时,为正常模式,当CM为1时,该电位器与序号比它高一级的电位器级联。比如,若WCR2的CM为1,表示电位器2就与电位器3级联。DW是电位器滑动端使能控制位。当DW为0时,为正常模式,当DW为1时,该电位器的滑动端失效,即滑动端处于绝缘悬浮状态。CM和DW配合使用可以实现电位器的级联,并可保证级联电位器在滑动时只有一个有效滑动端。
X9241的三字节指令序列传输示意图如图4所示,X9241还有一种递增/递减的控制方式,由于不常用,在此不再陈述。一个完整的X9241读/写时序包括以下几个部分:
(1)起始位。以SCL为高电平,SDA出现下跳沿为起始标志;
(2)传送X9241的从属设备地址字段;
(3)接收X9241返回的ACK(应答)信号,它是在SCL为高电平期间,SDA线上为低电平的状态;
(4)向X9241传送指令字段;
(5)接收X9241返回的ACK信号;
(6)如果是‘写’方式,则向X9241发送8bit数据。并接收ACK信号;如果是‘读’方式,则准备接收X9241将要返回的8bit数据,并在接收完成后,向X9241发送ACK信号;
(7)停止位。以SCL为高电平,SDA出现上跳沿为I2C传输的停止标志。
3 在TMS320F206型DSP中的应用
图5是笔者在氨氮传感器中使用X9241的部分电路示意图。在这个电路中,用X9241上的POT0和POT3代替原模拟电路中的两个10kΩ机械电位器来完成调整倍率和零点的任务。DSP的I/O2,I/O3分别连接到SCL和SDA端口上。该电路中,X9241的A3獳0均接地,所以它的设备地址是0000。因此在对这个芯片的电位器进行读/写操作时,第一字段应当是01010000,即50h(DSP的十六进制数)。
图6和图7分别是用IO2和IO3模拟I2C总线时,对X924进行读、写的子程序流程图。
4 结束语
使用数字电位器的主要优势是定位精度高,不受机械震动影响,并可以通过程控来实现半自动化调节。另外,由于数字电位器的VH、VL电压窗口较宽,因而能在许多场合取代机械模拟电位器。使用数字电位器的缺点是不能连续调节。由于每个数字电位器只有64档,所以对于离散多档位调节场合,用数字电位器很方便。而在需要连续调节的场合,似乎不如连续可调的模拟电位器方便。但是设计时可以采取以下方法进行补偿:
(1)多芯片级联使用,以增加有效档位;
(2)两个数字电位器配合使用,一个作为粗调,一个作为细调,两者搭配,可以得出许多种适合不同需要的组合。
总线 电压 电路 模拟电路 DSP 传感器 自动化 相关文章:
- 现场总线CANbus与RS-485之间透明转换的实现(01-26)
- Rapid IO---成就高速互连之美(05-06)
- PCI总线数据输出板驱动程序的开发(05-16)
- 采用PCI9052的ATM数据采集卡的接口电路设计(05-27)
- SJTAG技术在ATCA体系的应用(06-30)
- RS422/RS485总线模型分析与应用(06-24)