序列之13:RTC和比较器
时间:02-18
来源:互联网
点击:
本节我们主要是从下面4个方面进行讲解:
1.准备工作
2.硬件部分
3.软件部分
4.效果展示
一、准备工作
1.电脑一台;
2.已经安装好了MDK;
3.已经安装了nRF51_sdk软件;
4.已经安装了nrfgostudio_win-32;
5.以上已经确定安装成功了;
6.蓝牙开发板。
二、硬件部分
nRF51822 是 cortex m0 内核, 其串口通信也和其他的cortex m0 内核的处理器相同。并且在官方代码里给出了 uart 的参数配置库函数代码,这样使用起来非常容易上手。硬件连接如下图所示:
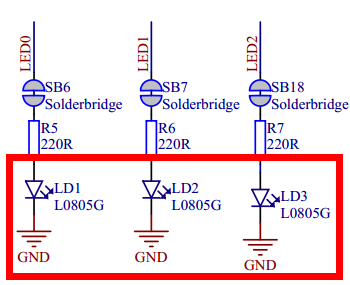
1.LED灯的硬件部分
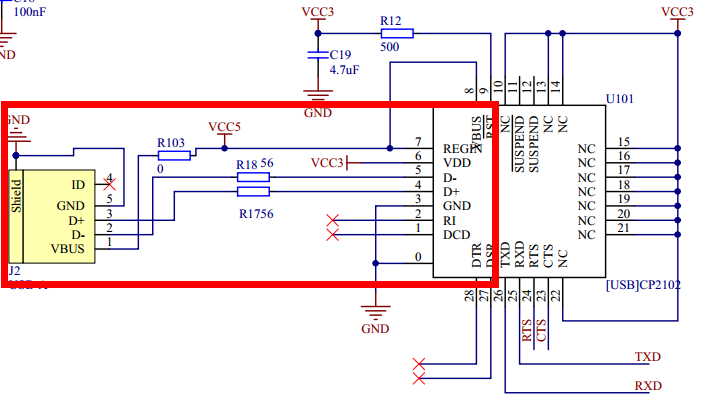
2.串口的硬件部分
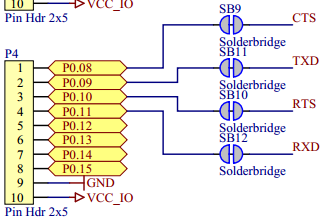
如下图所示: 青云 QY-nRF51822 开发板上,通过高质量的芯片 CP2102 实现 usb 转串口,下面是 nrf51822的芯片串口管脚分配:
管脚 P0.08 连接 CTS
管脚 P0.09 连接 TXD
管脚 P0.10 连接 RTS
管脚 P0.11连接 RXD,
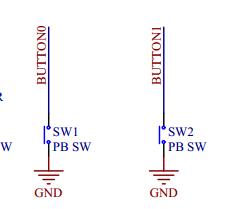
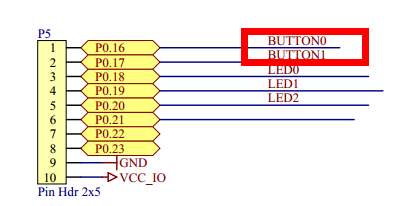
3.按键的硬件部分
如下图所示,用户按键有两个:Button0和Button1。
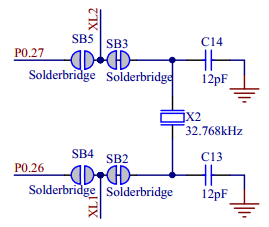
4.RTC硬件部分。如下图所示:
RTC硬件引脚为P0.26和P0.27,外接低速外部晶振32.768kHz。
三、软件部分
1.有了前面一节的基础,那下面就比较简单了,我们只需要编写主函数和按键接口函数即可。
2.主要包括下面3个文件:main.c、rtc.c和rtc.h。如下图所示
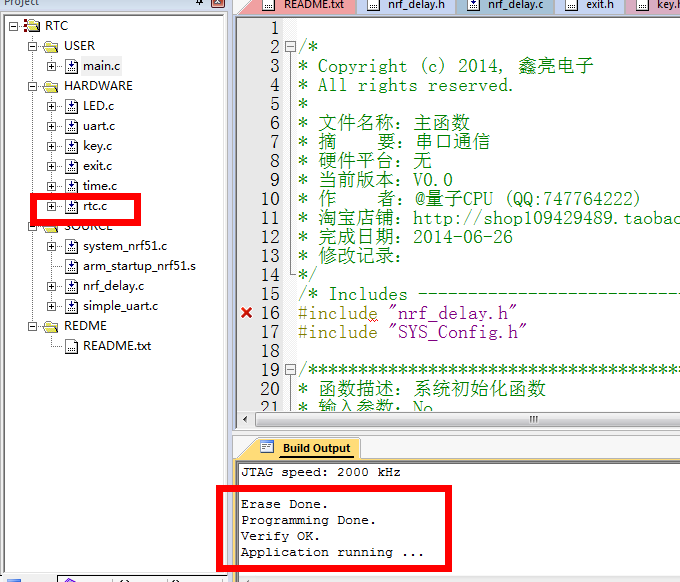
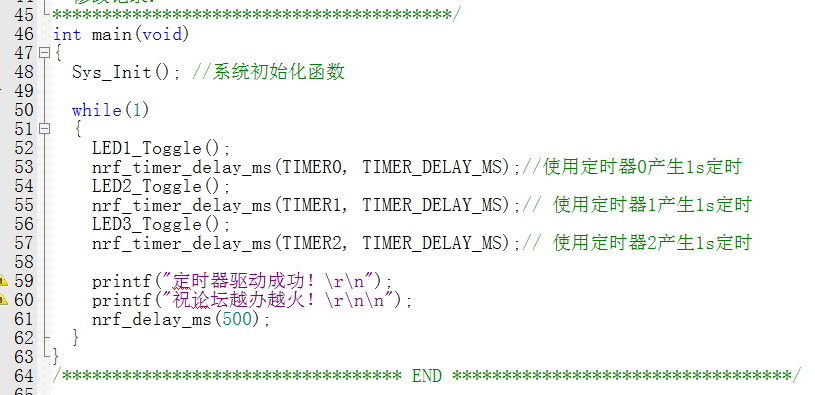
3.主函数部分。如下图所示:
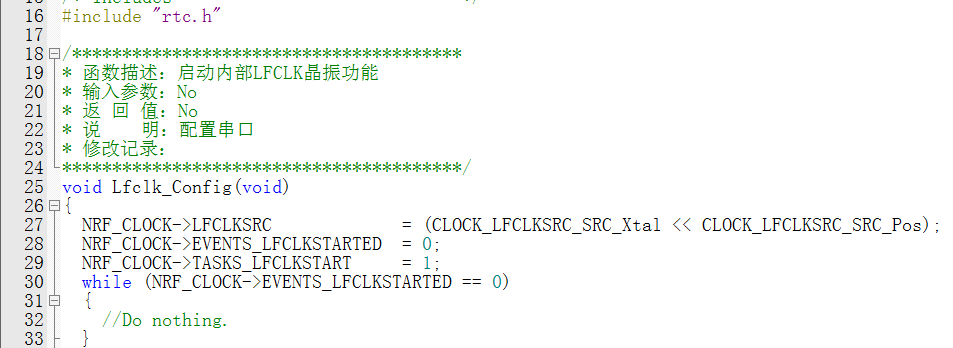
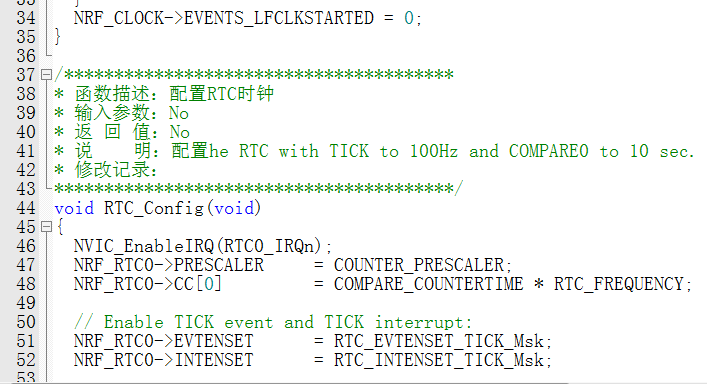
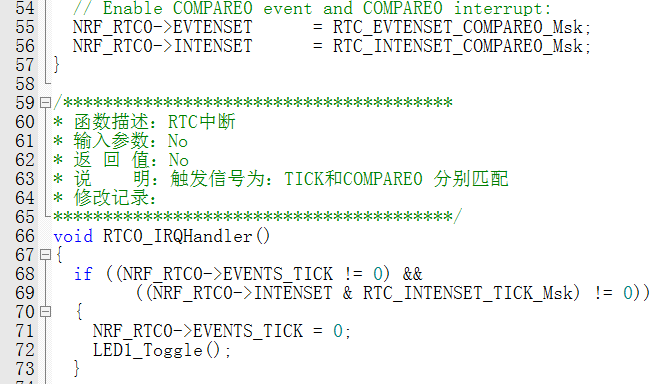
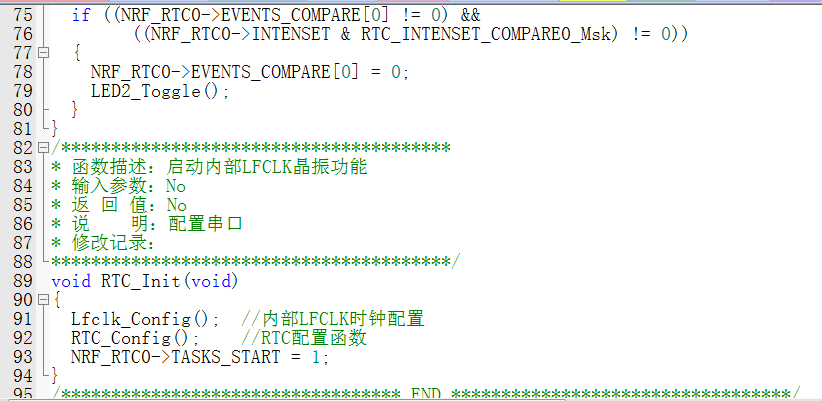
4.RTC源文件。如下图所示:
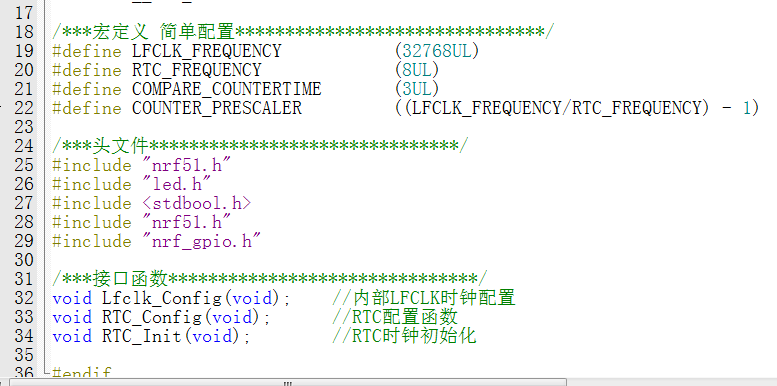
5.RTC驱动头文件。如下图所示:
四、效果展示
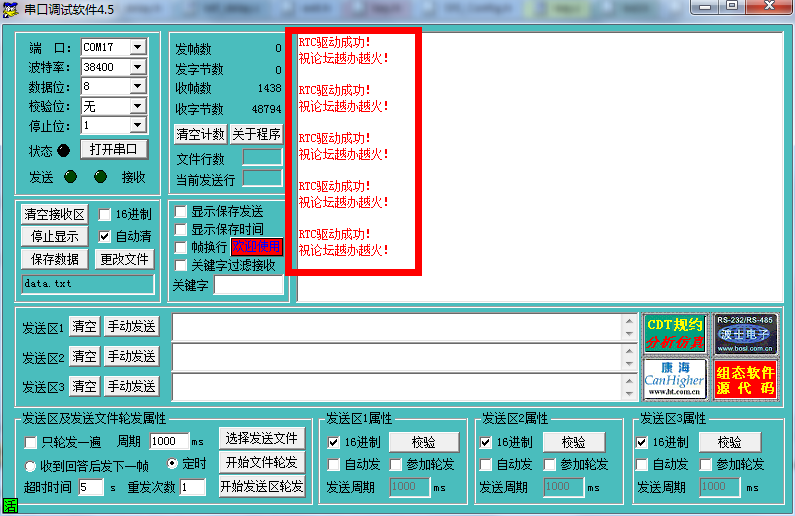
下面是下载之后效果验证,串口通信显示正常,RTC计数时间125ms控制led翻转一次,翻转24次接近3000ms,也就是3s的时候进行模拟比较报警,报警控制另一个led灯点亮报警。如下图所示:


1.准备工作
2.硬件部分
3.软件部分
4.效果展示
一、准备工作
1.电脑一台;
2.已经安装好了MDK;
3.已经安装了nRF51_sdk软件;
4.已经安装了nrfgostudio_win-32;
5.以上已经确定安装成功了;
6.蓝牙开发板。
二、硬件部分
nRF51822 是 cortex m0 内核, 其串口通信也和其他的cortex m0 内核的处理器相同。并且在官方代码里给出了 uart 的参数配置库函数代码,这样使用起来非常容易上手。硬件连接如下图所示:
1.LED灯的硬件部分
2.串口的硬件部分
如下图所示: 青云 QY-nRF51822 开发板上,通过高质量的芯片 CP2102 实现 usb 转串口,下面是 nrf51822的芯片串口管脚分配:
管脚 P0.08 连接 CTS
管脚 P0.09 连接 TXD
管脚 P0.10 连接 RTS
管脚 P0.11连接 RXD,
3.按键的硬件部分
如下图所示,用户按键有两个:Button0和Button1。
4.RTC硬件部分。如下图所示:
RTC硬件引脚为P0.26和P0.27,外接低速外部晶振32.768kHz。
三、软件部分
1.有了前面一节的基础,那下面就比较简单了,我们只需要编写主函数和按键接口函数即可。
2.主要包括下面3个文件:main.c、rtc.c和rtc.h。如下图所示
3.主函数部分。如下图所示:
4.RTC源文件。如下图所示:
5.RTC驱动头文件。如下图所示:
四、效果展示
下面是下载之后效果验证,串口通信显示正常,RTC计数时间125ms控制led翻转一次,翻转24次接近3000ms,也就是3s的时候进行模拟比较报警,报警控制另一个led灯点亮报警。如下图所示:
- 不断提升的蓝牙数据速率催生多种新兴应用(09-04)
- 面向大众市场的超宽带技术(09-04)
- 标准化进程难挡UWB市场增长,2011年出货量接近3亿 (09-04)
- 基于CSR CVC-HF系统的汽车蓝牙免提解决方案(09-08)
- 蓝牙与UART:互补配合,相辅相成(09-27)
- 浅析蓝牙技术 (上)(09-27)