为什么运算放大器会发生振荡?
虽然 Bode 图是一种很不错的分析工具,但是您可能没有还发现该图太过直观了。就运算放大器不稳定和振荡而言,Bode 图这是对常见原因的一种直观表述。
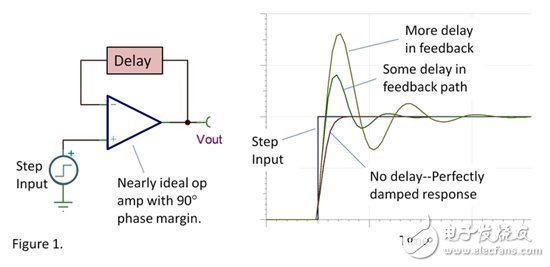
在反馈信号到达反相输入端时就会发生如图 1 中所示的完美的无延迟阻尼响应。运算放大器通过斜坡至最终阈值并在反馈信号检测到在适当输出电压时的闭合缓缓下降来进行响应。
当反馈信号延迟的时候问题就会进一步恶化。由于在环路中有延迟,放大器无法立即检测到其达到最终阈值的进程,进而以过快地向正常输出电压移动的形式表现为过响应。请注意延迟反馈越多最初斜率也就越快。反相输入无法及时接收到其已经达到并传递出正常输出电压的反馈。其将过冲目标并在最终建立时间前需要诸多连续的极性纠正。
如果是少量的延迟,您可能只是看到了一些过冲和振铃。如果是大量的延迟,那么这些极性纠正就会永无休止——进而形成振荡器。
延迟的根源通常是一个简单的低通 R-C 网络。就所有频率而言,这虽然不是一个恒定的延迟,但是该网络从 0° 到 90° 的逐渐相移会产生一个一阶逼近的时延,td=RC。
最常见的有两种情况,R-C 网络不经意间就会在我们的电路中形成。第一种情况是容性负载(请参见图 2a)。电阻就是运算放大器的开环输出电阻,当然电容器就是负载电容了。
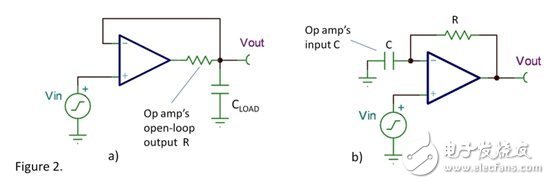
第二种情况是(请参见图2b)反馈电阻和运算放大器的输入电容形成了 R-C 网络。在这个敏感的电路节点电路板连接也是电容的重要因素。请注意这两个电路具有相同的反馈环路,唯一不同的是输出的节点不同。从环路稳定性的角度来说,他们会产生同样的问题。延迟反馈的这两个因素通常都会起作用——如果两个因素同时作用的话会带来更大的麻烦。
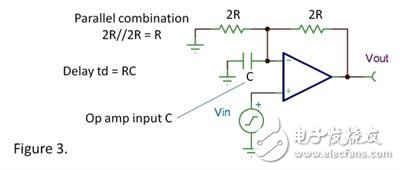
对于第二种情况需要作一点点解释:就简单的 G=1 缓冲器而言通常不需要反馈电阻,因此更为常见的一种情况是在使用了一个反馈电阻和电阻接地的增益结构中(请参见图 3)。R/C 电路中的这些并联的电阻就形成了高效的 R。
关于反馈放大器的 Bode 分析我们还有很多要学习的方面。因此该有关反馈路径中的延迟或相移如何影响稳定性的简单直观表述有助于您诊断并解决一些最常见的稳定性问题。
- 电感三点式振荡电路(01-24)
- 串联型晶体振荡电路(01-24)
- 石英晶体正弦波振荡电路(01-24)
- 三点式振荡电路能否振荡的判别方法(11-21)
- 带AGC稳幅的正弦波振荡电路设计(01-25)
- 考毕兹振荡电路的原理与Dip Meter(下陷表)的设计及制作(09-26)