TI 工程师分享参与设计竞赛中的收获
最近,我有幸参与了TI 2011Engibous设计大赛的评审工作。TI 此举的目的是激发大学生拿出优异的作品来参加Engibous设计大赛,同时我们也在寻找优秀的模拟和微控制器/处理器设计。然而,让这个项目得以实施的真正英雄是广大学生、教授、主办者、顾问和各个部门。作为比赛的评委,我要了解研究、规划、设计/模拟、制造、原型机和测试等阶段。
我一共评审了21 份决赛报告。评审期间,我看了很多的设计项目,也了解了这些项目的实现过程。这些设计都详细地说明了电路图、布局和固件代码。许多设计都运用了多学科知识,例如:组织学、项目可行性研究、电子学、机械学、固件/软件以及PC GUI 等。
最终,得克萨斯州休斯顿莱斯大学的参赛队摘得了Engibous设计大赛的桂冠。这支参赛队选择火星作为其下一个研究领域。获胜的这个设计团队("电动猫头鹰")为全自主无人驾驶飞行器开发出了一种飞行控制电子模块,而飞行器的任务是在人类登上火星以前获取它的地形地貌数据。他们的设计考虑包括了火星大气层、能源采集、星际运输、光传播延迟(通信)和高辐射环境问题等。
这是一项宏伟的计划,该设计团队决定首先开发出具备基本自动驾驶仪功能的飞行器。接下来,他们实现了冗余传感器功能,以展示系统容纳冗余的能力,如图1 和图2 所示。
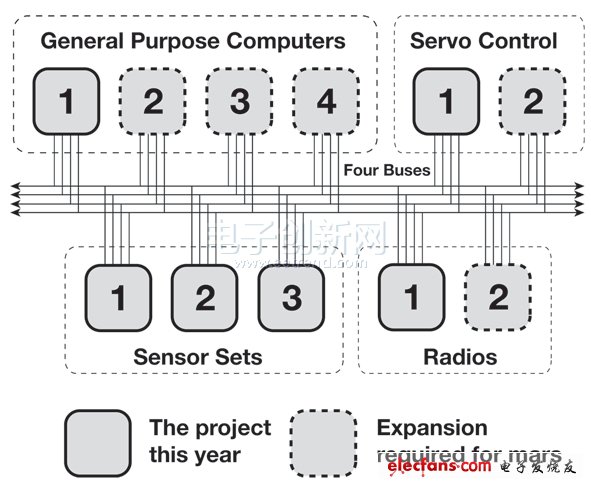
图1火星任务系统的系统结构图。
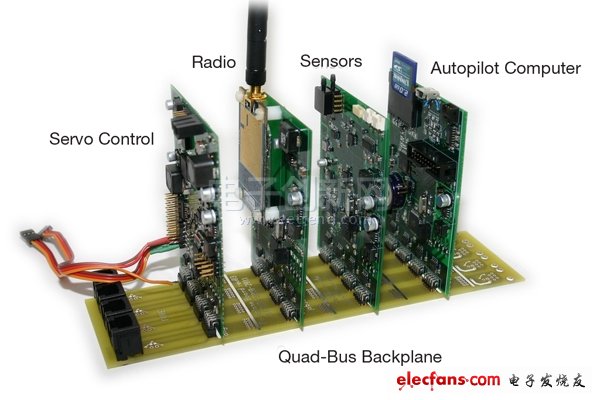
图2插到背板上的四种电路板。
当他们对原型机进行测试时,真正有趣的事情出现了。设计团队对项目实施期间的6次实际飞行测试进行了模拟。第一次,他们验证了伺服板能够正确接收、处理信号,并发送了正确时序的脉冲。第二次测试,使用背板(请参见图2)的三板测试却过早地结束了。由此,设计团队发现了一个遥测技术漏洞。之后,他们又模拟了两次飞行以测试自动驾驶仪功能,最后又进行了两次测试来验证冗余传感器的效果。
最终,这个小组设计和制作了固定翼无人驾驶飞行器的一整套航电硬件设备。设备采用模块化设计,将系统功能分布于四种不同的电路板上。设计团队给每块电路板的固件编写了代码,并逐一测试,包括基本自动驾驶仪算法和通用计算机板的定制实时内核。
辛苦工作了一年的结果,很不错啊!利用模拟芯片,设计团队为我们演示了系统的基本功能,这种系统在实际飞行环境下拥有三倍冗余的传感器组,航电设备硬件则安装在一个标准的RC 机身(现货,无需专门设计)内。飞行器成功地处理了来自每组传感器的数据,并利用这种数据通过自动驾驶仪让飞行器保持固定的航向。
- 《讲述.电子人》:电子工程师支教路,过程远比结果重要(02-26)
- 满足所有设计的电量计(07-12)
- 想在理工科领域有所成就?看看TI工程师怎么说(08-29)
- 工程师,您所不知道78%硬件失效的罪魁祸首(02-05)
- 教你成为优秀的模拟集成电路设计工程师(02-26)
- 模拟设计工程师的忧虑:经验知识重要吗?(02-27)