Buck开关型调整器及三种不同工作模式
引起续流二极管截止。如果出现此情况,电感左端开路。理论上,电感左端的电压应该回到,因为电感L不再有电流,不产生振荡。但是由于周围存在很多寄生电容,如二极管和SW的寄生电容,形成了振荡回路。如曲线2和曲线3,出现正弦信号,并在几个周期后消失,这与电阻阻尼有关。但是在实际测试中可能还是有差别的,比如我在ACT4065A测试中,测试SW/D的波形,振荡却在中间,如下图7所示,供应商工程师说这是在DCM模式,但是我没找到相关资料进行验证。
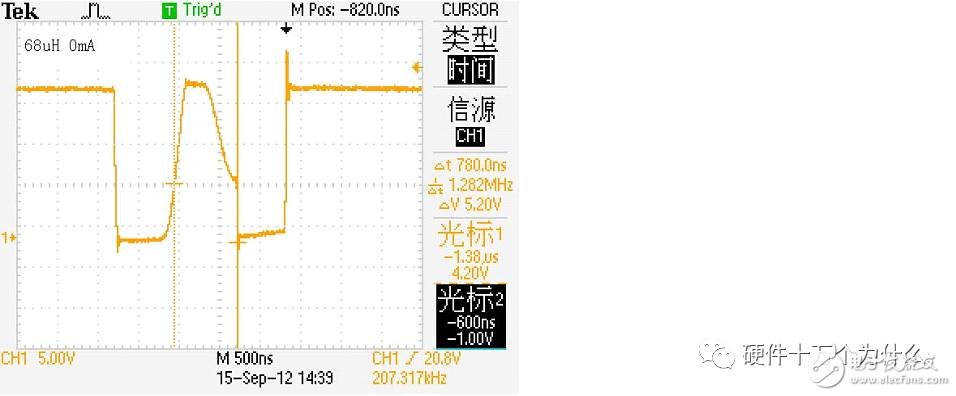
图7
Buck变压器在整个负载范围内都将输出电压控制在一个定值,即使电感进入不连续工作模式。因此很容易会让我们产生误区,认为电感进入不连续工作模式对电路工作没有影响。实际上,整个电路的传递函数已经发生变化,控制环路必须适应这种变化。
对于Buck调整器,电感进入不连续工作模式也没什么问题。在进入不连续模式之前,直流输出电压
注意到此公式与负载电流参数无关,所以当负载变化的时,不需调节占空比D,输出电压仍保持恒定。实际上,当输出电流变化时,导通时间也会稍微变化,因为Q1的导通压降和电感电阻随着电流的变化而略有变化,这需要Ton做出适当的调整。
进入DCM工作后,传递函数将发生改变,CCM的传递函数将不再适用,开关管的导通时间将随着直流输出电流的减小而减小。下面是DCM工作模式下的传递函数,占空比与负载电流有关,即

因为控制环路要控制输出电压恒定,负载电阻R与负载电流成反比关系。假设Vout,Vin、L、T、恒定,为了控制电压恒定,占空比必须随着负载电流的变化而变化。
在临界转换电流处,传递函数从CCM转变为DCM。工作CCM时,占空比保持恒定,不随负载电流而改变;工作于DCM时,占空比随负载电流减小而改变。
通过以上可以总结出DCM降压变换器的特点:
1、M依赖于负载电流;
2、对于想通的占空比,DCM下的传递系数M比CCM大在负载电流低工作于深度DCM,M容易达到1。
五、Buck调整器电感选择:
为了减小进入断续模式时的临界输出负载电流,我们可以通过加大电感量L,以降低临界输出负载电流。使电路在期望的负载电流范围内工作连续模式。


按理论计算我们应该用303uH,但实际中我们只用68uH,一部分跟成本有关,也跟我产品本身特点有关,空间要小,如果大电感根本就放不下,实际上个人觉得,够用就行。
以下是在测试ACT4065A时,关于输出负载电流临界值随电感量变化的一些波形:
1)、L1=27uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=27uH时,负载电流逐渐加大时振荡波形宽度减小,达到100mA时,波形在关断时无振荡波形产生,达到正常的开关状态。

0mA 100mA
2)、L1=33uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=33uH时,负载电流逐渐加大时振荡波形宽度减小,达到55mA时,波形在关断时无振荡波形产生,达到正常的开关状态。
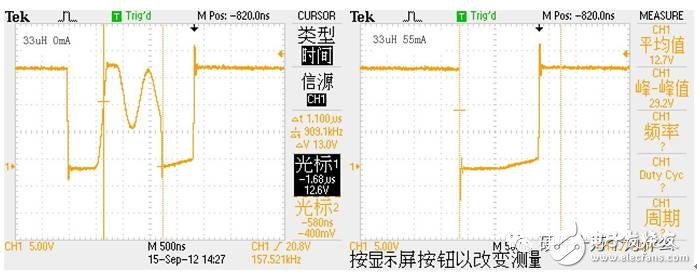
0mA 55mA
3)、L1=47uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=47uH时,负载电流逐渐加大时振荡波形宽度减小,达到45mA时,波形在关断时无振荡波形产生,达到正常的开关状态。

0mA 47mA
4)、L1=68uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=68uH时,负载电流逐渐加大时振荡波形度减小,达到30mA时,波形在关断时无振荡波形产生,达到正常的开关状态。

0mA 30mA
5)、L1=136uH,Uo=12.51V
通过改变负载电流大小,观察输出波形,在L1=136uH时,负载电流逐渐加
- EMI噪声分析及EMI滤波器的设计(10-07)
- 开关电源的EMC设计(09-15)
- 多层线路板在开关电源电路中应用(11-07)
- 双激式开关电源变压器存在的风险(01-20)
- 开关电源的分类及应用(02-17)
- 开关电源控制环路如何设计(04-11)