一文了解大型物联网框架中边缘节点检测和测量能力的4个基本方面
势。
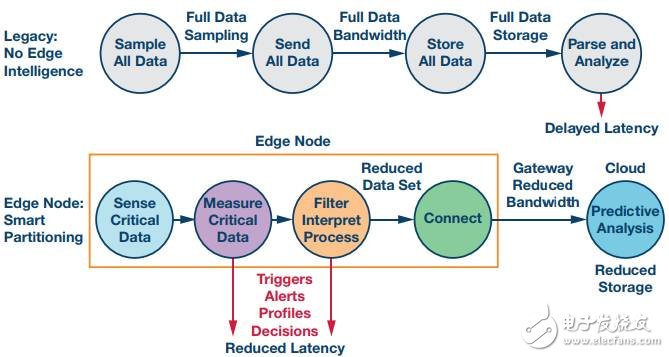
图3. 边缘节点的智能分区解决了以前无法解决的新挑战。信号链中更早的精简处理和智能实现了更高效的整体物联网解决方案。
实时决策依赖于边缘
物联网传感器主要为模拟传感器。具体的工业应用要求将决定边缘节点前端所需传感器的动态范围和带宽。在将信号转换为数字表示并传输到边缘外部前,信号链的前端将处于模拟域内。如果选择不当,模拟信号链中的各个元件都有可能限制边缘节点的整体性能。动态范围将为目标满量程传感器相对于本底噪声或下个最高无用信号的差值。
由于物联网传感器通常会同时寻找已知和未知活动,因此模拟滤波器并非始终有意义。数字滤波会在对信号进行采样后执行。除非在传感器的前端使用模拟滤波器,否则基波的谐波或其他杂散信号可能混入检测的信息并与目标信号竞争功率。因此,在设计阶段应该针对时域和频域中的意外检测信号制定应对计划,防止干扰伪像出现在测量数据中。
检测到的信息通常由信号链中接下来的ADC进行测量。如果使用分立元件来设计物联网边缘节点,则在选择测量ADC时应该注意不要减小传感器的动态范围。嵌入式ADC的输入满量程范围通常与传感器输出幅度匹配良好。理想情况下,传感器输出应消耗几乎整个ADC输入范围(在1 dB内),而不使ADC发生饱和,也不会在范围限制处被裁减掉。但是,也可以使用放大器级来对传感器输出信号进行增益或衰减,以便使ADC自身的动态范围达到最大。ADC满量程输入、采样率、位分辨率、输入带宽和噪声密度都会影响边缘节点的信号测量性能。
前端放大器可以嵌入在节点的测量级或作为分立元件置于ADC前。放大器的增益、带宽和噪声也可以增强边缘节点的性能。
信号链中传感器之后的测量ADC通常采用以下两种采样架构类型之一:
奈奎斯特速率
连续时间∑-? (CTSD)
其中后者在嵌入式ADC中更为常见。奈奎斯特速率ADC具有等于采样率频率一半(即fs/2)的平坦标称噪底。CTSD结合使用过采样率和陷波通带,使噪声超出目标带宽,从而增加动态范围。在了解边缘节点的模拟带宽和动态范围时,测量ADC架构及其分辨率非常关键。
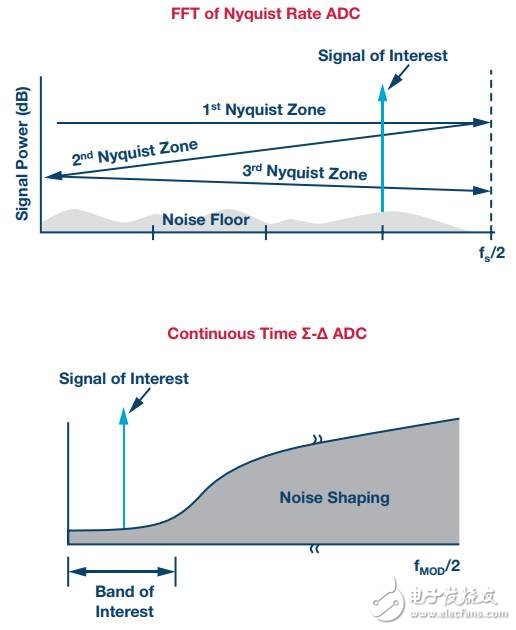
图4. 如果物联网传感器上没有前端模拟滤波器,奈奎斯特速率ADC会将超出第一奈奎斯特区域的高阶频率折叠回目标带宽中。相比之下,具有过采样调制时钟的CTSD ADC架构使用噪声整形来在目标频段中实现高动态范围。由于CTSD具有固有滤波能力,因此对信号混叠不太敏感。
举个例子
在频域中,1 Hz单位带宽的噪声密度将基于ADC的SNR以及噪声在ADC采样频谱上的分布宽度。在奈奎斯特速率ADC中,噪声频谱密度(每1 Hz带宽)为0 dB – ADC信噪比(SNR) – 10 ×log(fs/2),其中fs/2为采样率除以二或ADC的单个奈奎斯特区域。
理想SNR的计算公式为SNR = 6.02 × N + 1.76 dB,其中N为ADC位数。但是,ADC的实际SNR涉及到晶体管和半导体处理的非理想因素,这包括电气噪声和晶体管级元件瑕疵。这些非理想因素会导致SNR性能降到理想性能以下,因此请查阅ADC数据手册以了解SNR目标性能。
边缘节点的动态范围将由传感器的动态范围、信号的放大率(如果需要)和ADC满量程动态范围组成。如果传感器的满量程输出信号未达到ADC满量程范围输入的1 dB以内,则ADC的部分动态范围将会闲置。相反,如果来自传感器的输入超出ADC的量程,则会造成采样的信号失真。在计算边缘节点的动态范围时,放大器带宽、增益和噪声也是需要考虑的一部分。传感器、放大器和ADC的总电气噪声将为各RMS分量的平方和的平方根。
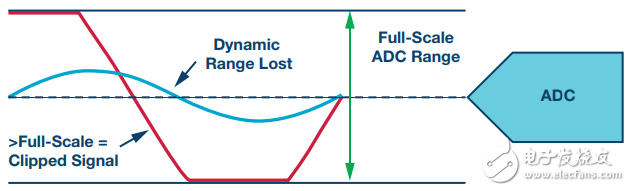
图5. 传感器信号输出幅度与ADC的输入满量程不匹配而出现动态范围丢失(蓝色)的示例。需要使用放大器最大程度地增大传感器的动态范围,同时防止ADC发生饱和(红色)。信号匹配必须考虑整个边缘节点信号链的带宽、动态范围和噪声。
智能工厂
在工业物联网中,机器振动状态监控将会是一项非常重要的应用。新型或传统机器设备可能拥有多个关键的机械元件,例如转轴或齿轮,这些元件可能装有高动态范围的MEMS加速度计。8 这些多轴传感器将对机械的振动位移进行实时采样。测量后,振动信号可以进行处理并与理想的机器配置进行比较。
在工厂中,
- Dust Networks 拓展工业无线以外的领域(10-09)
- 无线传感器可放置在任何地方,以在长距离提供低功耗和可靠的无线传感器网络(12-08)
- 可靠、低功耗无线传感器网络适用于物联网: 使无线传感器像网络服务器一样易于使用(05-06)
- 低功率是物联网的关键(09-14)
- 为工业物联网正确选择无线网格网络协议以实现新应用(04-03)
- 针对工业 IoT 应用的主要无线要求(02-15)