基于MTK和DSP的双目视角非接触3D指纹识别系统
MTK)平台,是一款通用的嵌入式手机开发平台;系统方案内部采用开放式的软硬件接口,具有强大的技术支持,用户可以快速地定制无线通信的应用。在本系统中,MTK平台作为控制核心,其功能从硬件底层来看是实现数据流的输入/输出;从3D指纹识别系统上层来看是实现双目视角的照相机驱动、结构光的产生和控制、图像数据的采集、与服务器无线传输通信等。MTK芯片的选择主要考虑了以下三个因素:
(1)控制投影仪产生结构光投影,需要支持高清晰度多(HDMI);
(2)控制双摄像头采集,需要高性能高速度的MTK芯片;
(3)为保证数据与服务器的实时无线传输,需快速的移动网络。
在MTK 公司的众多基带芯片中,MTK6577 是一款高性能的双核处理器。其主频只高达1.2 GHz,不仅芯片内核强大:采用Cortex A9构架,二级缓存高达1 MB,集成3G移动宽带连接,支持单模HSPA+网络,上传下载速度不低于5.6 Mb/s,集成了图像信号处理器、JPEG硬件编码和解码器,最高可以以15 f/s的速度进行800 万像素图像采集等;而且外围接口丰富,具有一个高清晰度多媒体接口(HDMI)和双摄像头接口。
2.2 DSP功能
数字信号处理器(DSP)在本系统中作为控制核心的附属机构,主要实现与MTK 芯片之间指纹数据的输入和输出、指纹算法运行处理这两大功能。前一个功能主要是依赖于硬件外部接口间实现,而后一个功能偏向于DSP芯片内部资源。因此,在选型方面主要考虑以下因素:
(1)与MTK 芯片之间实现数据通信,需要专用的外部存储器接口(External Memory Interface,EMIF);
(2) 为了保证实时性,专用的快速傅立叶(FastFourier Transform,FFT)运算硬件器更有利于指纹图像算法的执行。
TI 公司的TMS320C5515是一款高性价比的DSP芯片,专为生物模式识别应用而开发的。芯片采用定点数的TMS320C55xDSP 处理器核,内部有一个紧耦合式的FFT硬件加速器,主频可高达120 MHz,320 KB片上RAM,外加一个EMIF 接口,利于指纹识别系统的设计与开发。
3 系统硬件设计
3.1 双目视角的硬件接口
MTK6577 采用标准的移动应用处理器接口(Mobile Industry Processor Interface,MIPI)协议,方便了用户开发影像方面的应用。本文所设计的系统运用了MTK6577芯片自带的高速照相机串行接口(Camera serial interface,CSI)与相机模块OV8820 进行数据通信,并采用了串行相机控制总线(Serial Camera ControlBus,SCCB)控制相机进行采集事务,如图3所示。

图3 双目视角的硬件接口
3.2 双控制核心协同接口设计
双目视角的3D 指纹识别系统采用了双核心的模式。考虑到指纹识别系统需要完成图像采集、处理、存储并与服务器进行传输等事务,本系统中采用了两片由Micron公司生产的SDRAM存储器MT48LC16M16A2,通过Altera公司的CPLD 芯片,形成大容量双动态的数据存取方式,协同双控制核心的工作事务,如图4所示。MT48LC16M16A2 存储器片是一款具有256 MB 的大容量,位宽为16 b,4 个大小为4 MB 大小的存储Bank,不但片内Bank间可以实现乒乓式数据存取,而且片间的乒乓式数据存取,极大方便指纹采集与处理、暂存与传输等事务交替运行。
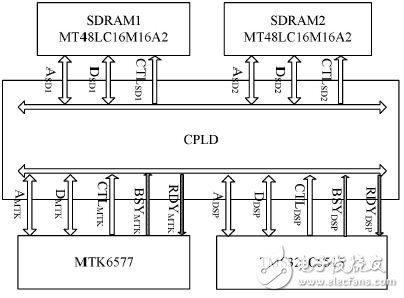
图4 双控制核心协同接口
4 系统软件设计
整个基于双目视角的3D指纹采集系统软件的设计主要包括客户端模块、服务器端模块和C/S结构下的协同开发三部分,系统软件框架如图5所示。
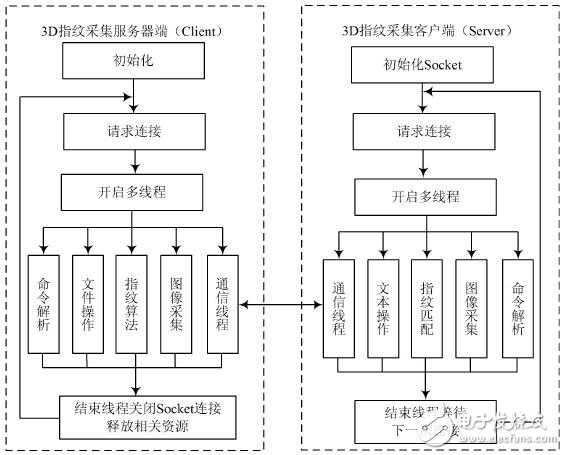
图5 系统软件框架
4.1 客户端模块设计
客户端模块基于Android平台进行开发的。在Android平台的应用层、应用框架层、组件库层和虚拟机等应用框架的基础上,开发了3D 指纹采集系统的指纹算法、图像采集等应用层的程序;在Android平台的Linux内核层经过可裁剪处理,改进双摄像头、增加结构光协同事务等硬件驱动。
客户端模块工作时,会请求与服务器连接,然后开启多任务多线程,监测采集事务,进行存储,指纹数据处理后,启动通信线程,发送至服务器,等待服务器匹配响应命令。
4.2 服务器端模块设计
服务器端模块设计基于Java语言进行开发的,功能的实现采用报文侦听方式。如图5所示,当服务器启动时,首先加入到一个组播地址中,然后初始化 Socket,并对规定的端口进行侦听。在客户端与服务器端连接请求并双方握手成功后,即进入等待请求解析命令等状态,可以接收客户端面的指纹数据,响应客户端的指纹匹配任务,根据匹配结果反馈给客户端。
5 结语
本文基于双目视角的 3D 成像原理,采用MTK 和DSP相结合的方法构建了一套指纹识别系统。该方案采用的3D指纹识
3D指纹信息采集 3D指纹识别 双目视角 嵌入式系统 Android 相关文章:
- 嵌入式系统在电源设计中的运用(09-20)
- 基于4G通信的嵌入式数据通信系统设计(10-10)
- 汽车安全性能亟待升级 嵌入式系统把关护航(05-07)
- USB端口找到新居,落户嵌入式系统(02-11)
- 嵌入式系统在电力变压器监测中的应用研究(09-18)
- 基于OMAP架构的嵌入式指纹识别系统设计与应用(04-29)