二次回路电路原理图及讲解(一)——电路天天读
6型,250V; SA — 控制开关,LW2-1a.4.6a.40.20.20/F8型;HG — 绿色信号灯具,XD2型,附2500Ω电阻;HR — 红色信号灯具,XD2型,附2500Ω电阻;
KL — 中间继电器,DZB-115/220V型;KMC—接触器; KOM — 保护出口继电器;QF—断路器辅助开关;WCL—合闸小母线;WSA—事故跳闸小母线; WS—信号小母线;YT—断路器跳闸线圈;YC—断路器合闸线圈,FU1、FU2—熔断器,RM10-60/25 250V;R1—附加电阻,ZG11-25型,1Ω;R2—附加电阻,ZG11-25型,1000Ω;(+)WTW—闪光小母线。
(一)"跳闸后"位置
当SA的手柄在"跳闸后"位置,断路器在跳闸位置时,其常闭触点闭合,+WC经FU1 →SA11-10 →HG及附加电阻→ QF(常闭) KMC线圈→ FU2 →-WC。此时,绿色信号灯回路接通,绿灯亮,它表示断路器正处于跳闸后位置,同时表示电源、熔断器、辅助触点及合闸回路完好,可以进行合闸操作。但KMC不会动作,因电压主要降在HG及附加电阻上。
(二)"预备合闸"位置
当SA的手柄顺时针方向旋转90o至"预备合闸"位置,SA9-10接通,绿灯HG回路由(+)WTW→ SA9-10→ HG QF(常闭)→ KMC→FU2 →-WC导通,绿灯闪光,发出预备合闸信号,但KMC仍不会启动,因回路中串有HG和R。
(三)"合闸"位置
当SA的手柄再顺时针方向旋转45o至"合闸"位置时,SA5-8触点接通,接触器KMC回路由+WC→ SA5-8→ KL2(常闭)→ QF(常闭)→KMC线圈 →-WC导通而启动,闭合其在合闸线圈回路中的触点,使断路器合闸。断路器合闸后,QF常闭触点打开、常开触点闭合。
(四)"合闸后"位置
松手后,SA的手柄自动反时针方向转动45°,复归至垂直(即"合闸后")位置,SA16-13触点接通。此时,红灯HR回路由 FU1→SA16-13→ HR →KL线圈→ QF(常开)→ YT线圈→ FU2→-WC导通,红灯亮,指示断路器处于合闸位置,同时表示跳闸回路完好,可以进行跳闸。
(五)"预备跳闸"位置
将SA手柄反时针方向转45°至"跳闸"位置,SA6-7导通,HR及R被短接,经+WTW→HR→KL→QF常开触点→YT→-WC回路,红灯闪光,发出预备合闸信号。
(六)"跳闸"位置
将SA手柄反时针反向45°至"跳闸"位置,SA6-7导通,HR及R被短接,经+WC→SA6-7→KL→QF常开触点→-WC,使YT励磁,断路器跳闸。断路器跳闸后,其常开触点断开,常闭触点闭合,绿灯亮,指示断路器已跳闸完毕,放开手柄后,SA复位至"跳闸后"位置。
当断路器手动或自动重合在故障线路上,保护装置将动作跳闸,此时如果运行人员扔将控制开关放在"合闸"位置(SA5-8触点接通),或自动装置触点KM1未复归,断路器SA5-8将再合闸。因为线路有故障,保护又动作跳闸,从而出现多次"跳合一"现象。此现象称为"跳跃"。断路器若发生跳跃不仅会引起断路器毁坏,而且还讲扩大事故,所谓"防跳"措施,就是利用操作机构本身机械上具有的"防跳"闭锁装置或控制回路中所具有的电气"防跳"接线,来防止断路器发生"防跳"的措施。
图4中所示控制回路采取了电气"防跳"接线。其KL为跳跃闭锁继电器,它有两个线圈,一个电流启动线圈,串于跳闸回路中;另一个电压保护线圈,经过自身常开触点KL1与合闸接触器线圈并联。此外在合闸回路中还串有常闭触点KL2,其工作原理如下:
当利用控制开关(SA)或自动装置(KM1)进行合闸时,若合在故障线上,保护将动作,KOM触点闭合,使断路器跳闸。跳闸回路接通的同时,KL电流线圈带电,KL动作,其常闭触点KL2断开合闸回路,常开触点KL1接通KL的电压自保持线圈。此时,若合闸脉冲未解除(如SA未复归或KM1卡住等),则KL可靠地断开合闸回路,使断路器不能再次合闸。只有当合闸脉冲解除(即KM1断开或SA5-8切断),KL的电压自保持线圈断电后,回路才能恢复至正常状态。
图中KL3的作用是用来保护出口继电器触点KOM的,防止KOM先于QF打开而被烧坏。电阻R1的作用是保证保护出口回路中当有串接的信号继电器时,信号继电器能可靠动作。
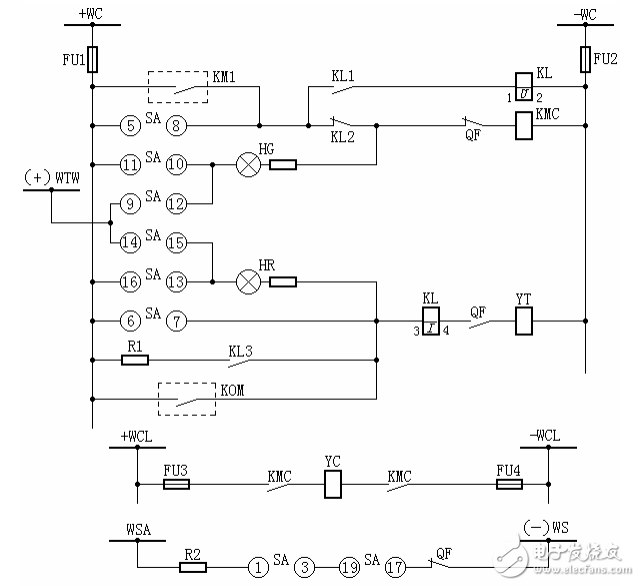
图4 灯光监视的断路器控制回路(电磁操动机构)
编辑点评:二次回路图的最大特点是逻辑性很强,其设备、元件的动作严格按照设计的先后顺序进行,所以看图时只要抓住一定的规律:先一次,后二次;先交流,后直流;先电源,后接线;先线圈,后触点;先上后下;先左后右。
接着
- 二次回路电路原理图及讲解(三)——电路天天读(07-15)
- 二次回路电路原理图及讲解(二)——电路天天读(07-14)
- 二次回路电路原理图及讲解(四)——电路天天读(07-17)
- 二次回路电路原理图及讲解(五)——电路天天读(07-21)
- 二次回路电路原理图及讲解(六)——电路天天读(07-23)