步进电机的控制系统设计,步进电机的开环控制解析
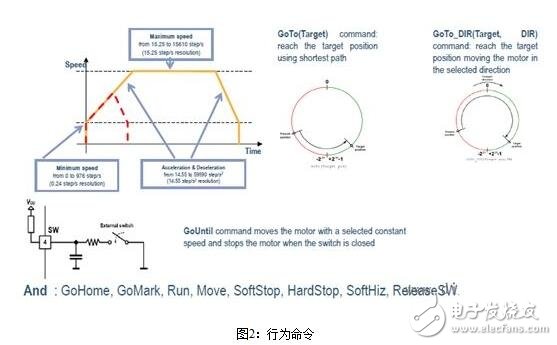
由行为命令控制,例如,绝对位置请求,并按照预设转速曲线边界驱动电机运动。全部指令集包括相对位置和绝对位置(达到目标位置)、转速跟踪(达到并保持目标转速)和电机停止顺序,还包括机械位置传感器管理专用命令。图2所示是前述部分命令。
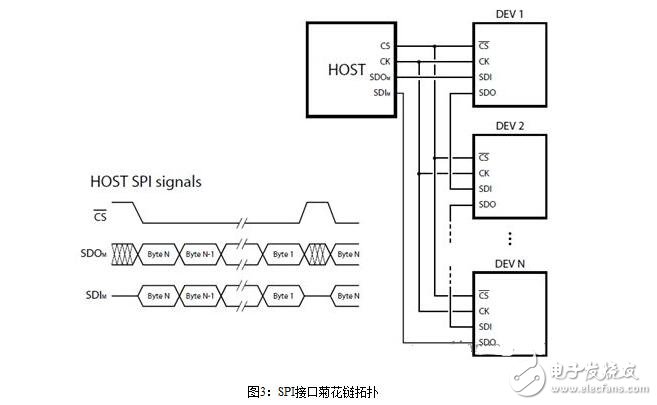
该控制器通过具有菊花链功能的高速SPI总线接口与主微控制器通信。
通过一个串行接口,一个微控制器能够管理多个控制器,从而控制多台步进电机,如图3所示。
步进电机的开环控制
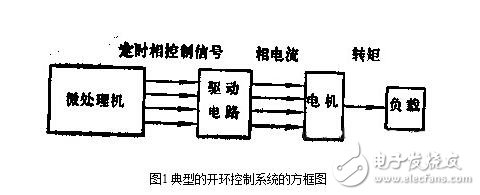
系统设计时首先考虑稳态性能。由允许的最大位置误差和要求的最高步进频率选择步进电机和驱动电路。完成了这种选择之后,接下来应考虑怎样对电机和驱动电路进行控制,怎样把它们连接到系统的其他部分。开环控制具有简单因而成本低等优点,常用于简易的经济型数控机床改造等技术中。图1是典型的开环控制系统的方框图。相控制信号可以由微处理机产生,也可以用某种形式的时序电路产生。不管这种信号怎样产生,设计者都需要知道它在定时上有些什么限制。例如特定负载转矩的最高步进频率;又如电机加速负载惯量的时间等。
开环控制方案中,负载位置对控制电路没有反馈,因此,步进电机必须正确地响应每次激磁变化。如果激磁变化太快,电机不能够移动到新的要求的位置,那么,实际的负载位置相对控制器所期待的位置将出现永久误差。如果负载参数基本上不随时间变化,则相控制信号的定时比较简单。但是,在负载可能变化的应用场合中,定时必须以最坏(即最大负载)情况进行设定。当然,这样确定的控制方案对所有其他负载并非最佳。
1. 启停频率
最简单的开环控制方式是步进频率恒定的那种控制方式(图2),电机在达到目标位置之前都以这个频率转动。相控制信号由时序发生器产生,时序发生器由来自恒频时钟的步进命令脉冲触发。"启动"信号接通这个时钟,使电机以等于钟频的步进频率运行;"停止"信号关断这个时钟,使电机停转。转动方向一开始就送到相时序发生器,因此,它产生的相控制信号能以合适的方向运转电机。目标位置送入减法计数器,并以这个计数器记录执行的步致。时钟脉冲同时送给相时序发生器和减法计数器。于是,相激励以恒定的钟频变化,减法计数器记录电机相对目标的瞬时位置。
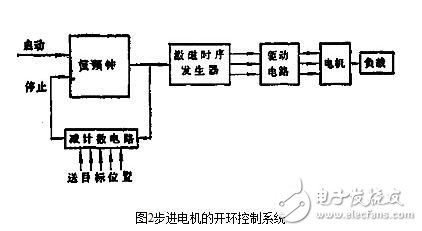
负载达到目标位置时,减法计数器的内容成为零。时钟的"停止"信号利用这个零产生。如果恒定钟统频率太高,电机不能把负载惯量加速到对应的步进频率;系统或者完全不能工作,或者在行程的开始阶段失步。从静止开始,电机能响应而不失步的最高步进频率叫做"启动频率"。与此类似,"停止频率"是系统控制信号突然关断,而电机不冲过目标位置的最高步进频率。对任何电机-负载组合来讲,启动频率和停止频率之间的差别都很小。粘性摩擦使加速度和步进频率降低,但有助于减速,因此,提高了停止频率。不过,在简单的恒频系统里,时钟必须调整在两者之中较低的那个频率上,以此确保可靠的启动和停止。
电机从静止开始加速时,步进频率很低;每相激磁周期比相电路的电气时间常数长得多。在这种情况下,系统性能能够用电机的静转短/转子位置特性来分析。分析结果得知,(1)如果电机的转矩(TM)增大或负载转矩(TL)减小,则能提高启动额率;(2)减少系统惯量(电机惯量+负载惯量)也能提高启动频率。
在系统工作寿命内.由于零部件磨损,将影响负载转矩。为了允许负载转矩略为变化,恒频钟应比求得的启动频率略低,且可调。为了确保系统在工作速度情况下对机械谐振不敏感,还应考虑失步转矩/频率特性。如果算得启动频率恰巧等于谐振频率,那么,应改用较低频率的时钟,或者通过增加阻尼降低谐振影响。实际工作中,启动频率也常常通过试验求得。
2.加速和减速工作
因为步进电机系统的启动频率比它的最高运行频率低得多,因此,为了减少定位时间,常常通过加速使电机在接近最高的速度下运行。随着目标位置的逼近,为使电机平稳地停下来,重新使步进频率逐渐降低到启停电机频率。从初始位置往目标位置运动的整个过程中,步进频率都在变。若以曲线表示即得"速度曲线",如图3所示。注意;减速可以比加速快得多,因为负载转矩帮助系统
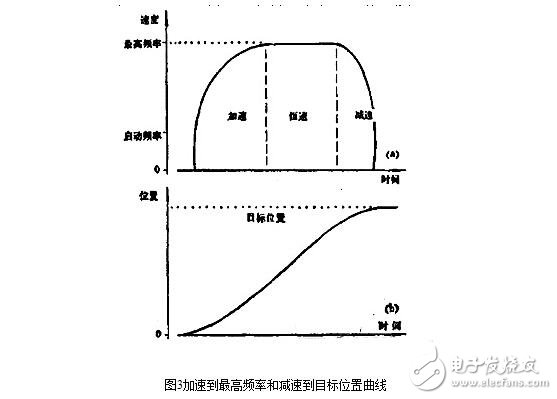
制动;而且,电机产生的减速转矩比 (a)速度曲线;(b)对应的位置/时间响应曲线
加速转矩大。
3.开环控制的实现
对任何系统,选择控制方式都要考虑性能高和成本低等要求。例如,为了使加速方式最佳,也许要求按指数曲线上升,但是,实现的费用高。设计者也许会用比较简单的线性斜坡来折衷,因为
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 德州仪器步进电机控制方案(04-12)