步进电机的硬件电路设计,步进电机驱动原理及方法
通电时,转子在反应转矩的作用下,逆时针方向转过30,°使转子齿2,4 的轴线与定子B 相极轴线对齐,即转子走了一步,如图4(B)所示, 若再断开B相,使C相控制绕组通电,转子又转过30° 使转子齿1,3 的轴线与定子C相极轴线对齐,如图4(C)所示。如此按A-B–C-A 的顺序轮流通电,转子就会一步一步地按逆时针方向转动,其转速取决于各相控制绕组通电与断电的频率,旋转方向取决于控制绕组轮流通电的顺序若按A-C-B-A 的顺序通电,则电机按顺时针反方向转动。
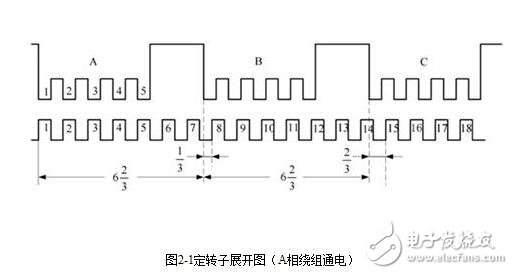
上述通电方式称为三相单三拍运行,"三相"是指三相步进电动机,"单"是指每次只有一相控制绕组通电,控制绕组每改变一次通电方式称为一拍,三拍是指经过三次改变通电方式为一个循环,我们称每一拍转子转过的角度为步距角。三相单三拍运行时的步距角为30度。其原理图如2所示:
2.2 三相双三拍通电方式
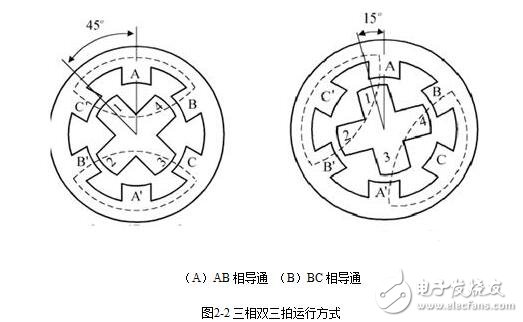
控制绕组的通电方式为AB-BC-CA-AB 或AB-CA-BC-AB 每拍同时有两相绕组通电三拍为一个循环,当A B 两相控制绕组同时通电时转子齿的位置应同时考虑到两对定子极的作用,只有A 相极和B 相极对转子齿所产生的磁拉力相平衡才是转子的平衡位置如2-2 B 所示,可见双三拍运行时的步距角仍是30°,但双三拍运行时每一拍总有一相绕组持续通电,例如由A B 两相通电变为B C 两相通电时,B 相保持持续通电状态C 相磁拉力图使转子逆时针方向转动,而B 相磁拉力却起有阻止转子继续向前转动的作用。即起到一定的电磁阻尼作用所以电机工作比较平稳,而在三相单三拍运行时由于没有这种阻尼作用,所以转子达到新的平衡位置容易产生振荡稳定性不如双三拍运行方式。三相双三拍运行方式AB相与BC相导通的结构如图2-2所示:
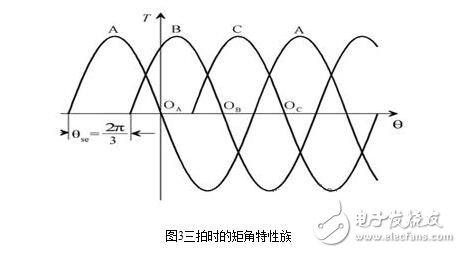
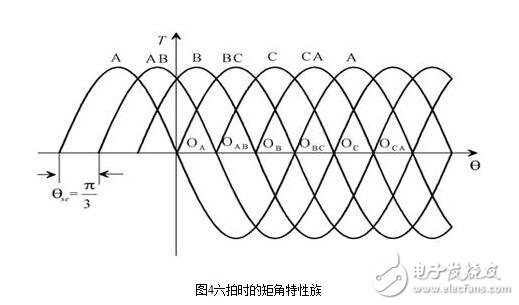
在分析步进电动机动态运行时,不仅要知道某一相控制绕组通电时的矩角特性,而且要知道整个运行过程中各相控制绕组通电状态下的矩角特性,即所谓矩角特性族以三相单三拍的通电方式为例,若将失调角θ的坐标轴统一取在A 相磁极的轴线上,显然A 相通电时矩角特性如图3中曲线A 所示稳定平衡点为O,点B 相通电时转子转过1/3 齿距相当于转过2π/3 电角度,它的稳4-3中曲线C, 这三条曲线就构成了三相单三拍通电方式时的矩角特性族总之矩角特性族中的每一条曲线依次错开一个用电角度表示的步矩角![]()
同理可得到三相单双六拍通电方式时的矩角特性族如图4与5 所示:
步进电机的动态特性是指步进电动机在运行过程中的特性它直接影响系统工作的可靠性和系统的快速反应。
(1)单步运行状态
单步运行状态是指步进电动机在一相或多相控制绕组通电状态下仅改变一次通电状态时的运行方式。
(2)动稳定区
当A 相控制绕组通电时矩角特性如图中的曲线A 所示,若步进电动机为理想空载则转子处于稳定平衡点![]() 处,如果将A相通电改变为B相通电,那么矩角特性应向前移动一个步距角
处,如果将A相通电改变为B相通电,那么矩角特性应向前移动一个步距角![]() 变为曲线B,
变为曲线B,![]() 点为新的稳定平衡点由于在改变通电状态的初瞬转子位置来不及改变还处于θ=0的位置,对应的电磁转矩却由O 突变为曲
点为新的稳定平衡点由于在改变通电状态的初瞬转子位置来不及改变还处于θ=0的位置,对应的电磁转矩却由O 突变为曲![]() 线B上的C 点,电机在该转矩的作用下转子向新的稳定平衡位置,移动直至到达
线B上的C 点,电机在该转矩的作用下转子向新的稳定平衡位置,移动直至到达![]() 点为止对应它的静稳定区为止,(-π+
点为止对应它的静稳定区为止,(-π+![]() )《θ 《(π+
)《θ 《(π+![]() ), 即改变通电状态的瞬间只要转子在这个区域内就能趋向新的稳定平衡位置,因此把后一个通电相的静稳定区称为前一个通电相的动稳定区,把初始稳定平衡点OA 与动稳定区的边界点A 之间的距离称为稳定裕度,拍数越多步距角越小,动稳定区就越接近静稳定区稳定裕度越大,运行的稳定性越好转子从原来的稳定平衡点到达新的稳定平衡点的时间越短,能够响应的频率也就越高。原理图如5所示:
), 即改变通电状态的瞬间只要转子在这个区域内就能趋向新的稳定平衡位置,因此把后一个通电相的静稳定区称为前一个通电相的动稳定区,把初始稳定平衡点OA 与动稳定区的边界点A 之间的距离称为稳定裕度,拍数越多步距角越小,动稳定区就越接近静稳定区稳定裕度越大,运行的稳定性越好转子从原来的稳定平衡点到达新的稳定平衡点的时间越短,能够响应的频率也就越高。原理图如5所示:
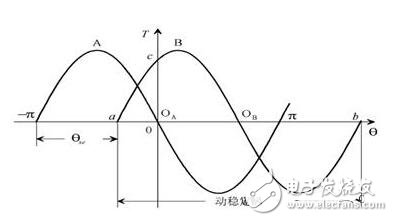
图5 稳定响应曲线
(3)最大负载能力
步进电动机带恒定负载时负载转矩为![]() \* MERGEFORMAT ,
\* MERGEFORMAT , \* MERGEFORMAT 若A 相控制绕组通电则转子的稳定平衡位置为图 A中曲线A 上的
\* MERGEFORMAT 若A 相控制绕组通电则转子的稳定平衡位置为图 A中曲线A 上的![]() \* MERGEFORMAT 点,这一点的电磁转矩正好与负载转矩相平衡,当输入一个控制脉冲信号通电状态由A相改变为B 相,矩角特性变为曲线B 在改变通电状态的瞬间电机产生的电磁转矩
\* MERGEFORMAT 点,这一点的电磁转矩正好与负载转矩相平衡,当输入一个控制脉冲信号通电状态由A相改变为B 相,矩角特性变为曲线B 在改变通电状态的瞬间电机产生的电磁转矩![]() \* MERGEFORMAT 大于负载转矩
\* MERGEFORMAT 大于负载转矩![]() \* MERGEFORMAT ,电机在该转矩的作用下转过一个步距角到达新的稳定平衡点OB´,如图6所示:
\* MERGEFORMAT ,电机在该转矩的作用下转过一个步距角到达新的稳定平衡点OB´,如图6所示:
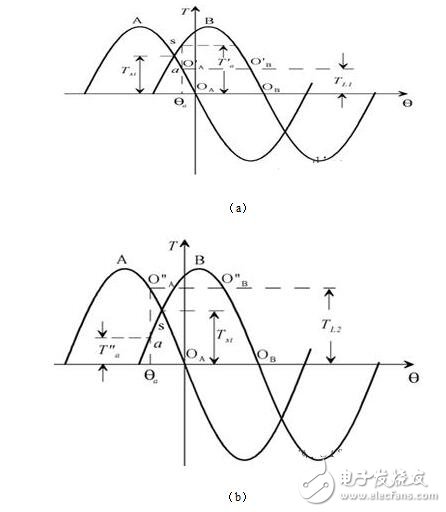
图6 最大负载转矩的确定
(a)  (b)
(b) 
如果负载转矩增大为![]() \* MERGEFORMAT ,且
\* MERGEFORMAT ,且 ,如图4-14(B)则初始平衡位置为
,如图4-14(B)则初始平衡位置为![]() \* MERGEFORMAT 点,但在改变通电状态的瞬间电机产生电磁转矩为
\* MERGEFORMAT 点,但在改变通电状态的瞬间电机产生电磁转矩为![]() ,由于
,由于 ,转子不能到达新的稳定平衡位置点
,转子不能到达新的稳定平衡位置点![]() ,而是向失调角θ减小的方向滑动,电机不能带动负载作步进运行,这时步进电动机实际上是处于失控状态,由此可见只有负载转矩小于相邻两个矩角特性交点S 所对应的电磁转矩
,而是向失调角θ减小的方向滑动,电机不能带动负载作步进运行,这时步进电动机实际上是处于失控状态,由此可见只有负载转矩小于相邻两个矩角特性交点S 所对应的电磁转矩![]() 才能保证电机正常的步进运行,把
才能保证电机正常的步进运行,把![]() 称为最大负载转矩也称为启动转矩当然它比最大静转矩
称为最大负载转矩也称为启动转矩当然它比最大静转矩![]() 可求得启动转矩公式2-1。
可求得启动转矩公式2-1。
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 德州仪器步进电机控制方案(04-12)