运算放大自激震荡电路设计大总结
运放振荡两个条件
1、环路增益大于1(|AF|大于等于1) 2、反馈前后信号的相位差在360度以上,附加相位180以上(由于负反馈接反向端)。
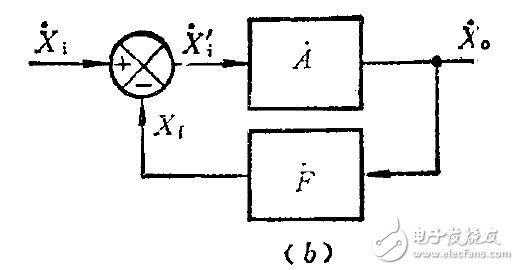
A(开环增益) = Xo/Xi F(反馈系数)=Xf/Xo
2. 运放震荡判断方法:
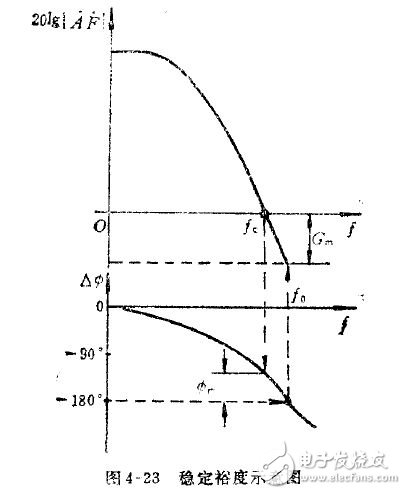
常用的是相位裕度,即20lg|AF|=0时,相位偏移是否超过180,什么是穿越频率?
G(S)*H(S)对应的增益为1(即幅值不变)的频率即为穿越频率。换算为dB单位:20log1=0dB。
3. 消除自激的方法:
由自激震荡条件可知,消除震荡可从两个方面着手:
(一)减少环路增益(但该方法增加了运放增益误差)
对运放来说,就是减少反馈系数F,换句话说,F越大,产生自激震荡的可能性越大。对于电阻反馈网络,F的最大值是1,F=1的典型电路就是电压跟随电路。这就是电压跟随运放易震荡原因(这也是我们常常会看到运放手册标有单位增益稳定说明的原因,但电压跟随的增益误差较小)。这也是对于电压反馈来说,容性负载驱动能力随闭环增益成比例增加。所以,如果闭环增益为1时,VFA可稳定驱动100pF容性负载,那么闭环增益为10时,便能驱动1000pF容性负载但由于设计原因,闭环增益的大小通常不是能够随便改变的,故该方法适用性不强。
(二 )增大相位裕度
要求在穿越频率点上,开环传递函数G(S)*H(S)的相移应该与180°保持足够的裕量。这个裕量选取多少比较合适呢?目前在工程应用上通常选取45°,即要求传递函数G(S)*H(S)的相移应该小于135°
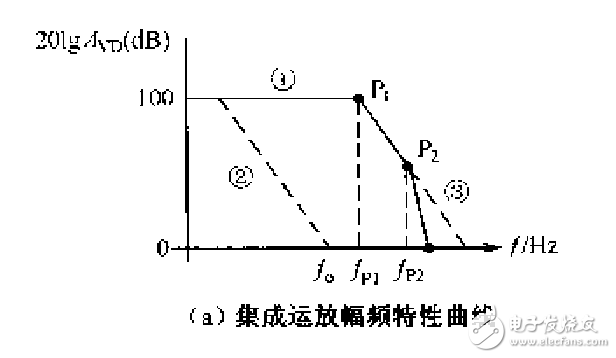
相位补偿:
按补偿原理分滞后补偿、超前补偿及滞后一超前补偿。滞后补偿:凡是使相移滞后的补偿即被称为滞后补偿。滞后补偿使主极点频率降低,即放大器频带变窄。(类似RC低通滤波)----------曲线②。超前补偿:凡是使相移超前的补偿即被称为超前补偿,超前补偿使幅频特性曲线出现零点,即放大器频带变宽 (类似RC高通滤波)-----曲线③
对于负载存在的容性(CL),环路增益在输出电阻和CL的作用下降低。同时,相位和增益之间不再有比例关系,相位滞后成为决定性因素。
1. 环路外补偿--超前补偿(适用小容性负载1500pf或负载阻抗一定)在运放的输出端和负载电容之间串入一个电阻RX,一般而言它的阻值为10-100欧姆。
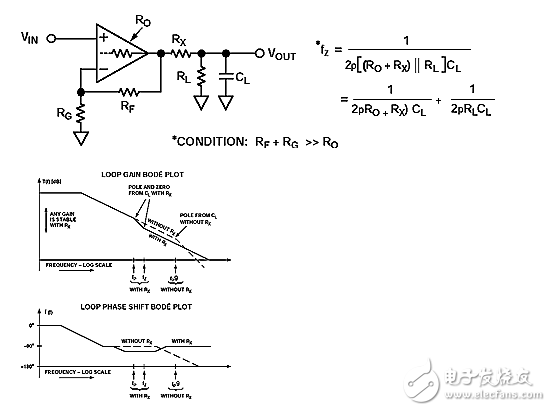
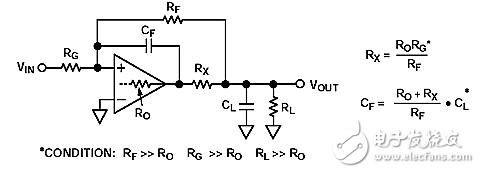
2. 环路内补偿--超前补偿(适用大容性负载1500pf或负载阻抗不定) Rx在运放反馈环路以内,同时在反馈电阻上并联一个反馈电容(该电容可消除运放输入电容及杂散电容形成极点),一般而言:Rx=50~200Ω,Cf约为3~10pF
- 六种常见恒流源电路图与解析(07-25)
- 恒流源的应用教程(05-28)
- 基于PWM技术的数控恒流源电路设计(08-06)
- 小工程师耗时一个月DIY的恒压、恒流源(08-08)
- 浅谈如何设计三线制恒流源驱动电路(02-21)
- 基于单片机控制的恒流源电路技术研究(07-18)