pi调节器的输入和输出_pi调节器的传递函数
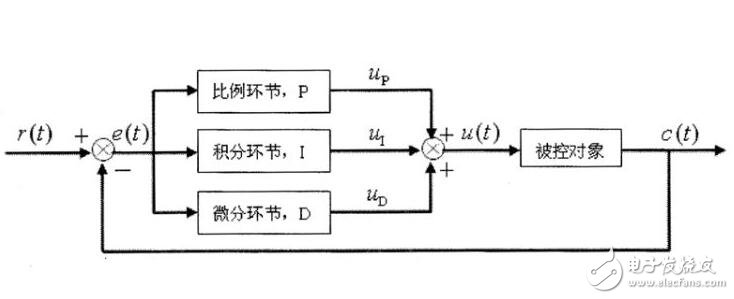
PI调节器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例(P)和积分(I)通过线性组合构成控制量,对被控对象进行控制。比例调节作用:按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。积分调节作用:使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决于积分时间常数TI,TI越小,积分作用就越强。反之TI大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
pi调节器的输入和输出及穿点函数方面是一个比较难的知识,大家都不太了解,今天就跟小编一起整理下逻辑,重温下这些知识吧!
pi调节器
pi调节器的输入和输出的关系
PI只是一个误差控制器,输入量可以为任意数据,例如我们的电梯中,人的载荷重量是一个参数,它会导致电梯转速的变化,然后电梯转速会变慢,为了稳定,就要采集电梯的载荷引起的速度变化,可能是一个传感器的电压,可能是一个传感器输出的16位转速数据等等,进行PI计算,输出结果是对电梯速度进行调节的值,可以是电压的改变量,也许也可以是对电梯电机的变频器进行调节等等。
比例积分(PI)控制的传递函数
k+ ki/s
PI调节器里面的Ki,kp值该如何计算选取
理论推导的话,找一本控制理论书;
用仿真的方式的话,可以用优化工具箱。
Response OptmizaTIon,simulink模型的一个菜单选项可以找到。
如果你用的是PID模块的话,点击模块上的Tune按钮,手动调节。
知识小课堂:如何知道PI控制中的Kp和Ki去多少合适?
PID调节,这个解释起来比较麻烦,电机矢量控制有一般设置,您可以按照通用设置,设置参数。
当然你也可以自己设置,其中比例调节效果比较明显,您可以通过改变KP值来调整速度。
.PID常用口诀:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
2.PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:
温度T: P=20~60%,T=180~600s,D=3-180s
压力P: P=30~70%,T=24~180s,
液位L: P=20~80%,T=60~300s,
流量L: P=40~100%,T=6~60s。
PI调节器 相关文章:
- pi调节器原理_pi调节器电路图_pi调节器参数作用(07-03)
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 严酷的汽车环境要求高性能电源转换(08-17)
- 适用于工业能源采集的技术 (08-10)