提高步进电机运行质量的电流控制方法
样的问题。
双向电流采样
传统的步进驱动,在每个H桥下管源极和地之间接外部检测电阻,只测量PWM导通时检测电阻上的正向电压。在慢衰减模式下,电流循环通过内部MOSFET,不通过检测电阻,因此无法测量电流。在快衰减模式下,通过电阻的电流翻转,产生的是负电压。对于目前的电源IC工艺,负电压很难被简单的采样处理。
如果我们可以监控电流衰减时期的绕组电流,许多步进电机驱动的电流调节问题就能被解决。但是,如上所说通过外部检测电阻很难实现,更好的选择是尝试内部电流检测。内部电流检测允许在任何时候监测电流,如PWM导通时间,以及快衰减和慢衰减过程中。 虽然它增加了驱动IC的复杂性,但内部电流检测大大降低了系统成本,因为外部的采样电阻不需要了。 这些电阻非常大且昂贵,价格通常和驱动IC差不多!
MP6500步进驱动IC
MP6500双极性步进电机驱动芯片,集成内部电流检测,很好的取代了传统廉价的峰值电流控制双极步进电机的驱动IC。MP6500内部电路框图如图5所示。
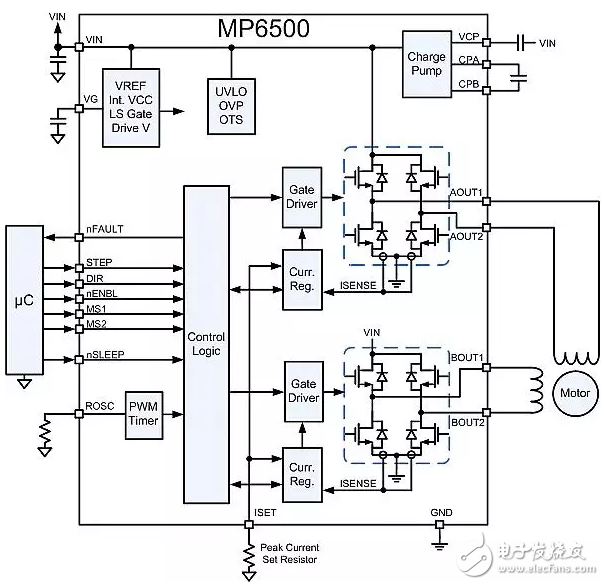
图5:MP6500电路框图。
MP6500最大驱动电流峰值为2.5A(具体取决于封装和PCB设计);电源电压范围从4.5V至35V。 支持整步,半步,四分之一步,八分之一步驱动模式。不需要外部电流检测电阻,只需要一个接地的小型、低功耗电阻去设定绕组电流峰值。
内部电流检测依赖于精准的功率管及相关电路的匹配设计,可以保证始终准确采样绕组电流,从而提高步进电机的运行质量。
通常情况下, MP6500工作在慢衰减模式下。然而,当一个固定关断时间结束,慢衰减结束后,如果当前绕组电流仍高于预期水平,快衰减模式会被开启以用来迅速减小驱动电流到所需值。 这种混合控制模式,使得驱动电流快速下降到零,同时又保证平均电流尽量接近设定值。 当step跳变时,快衰减就被采用使得当前电流迅速被调整到零,如图6所示。
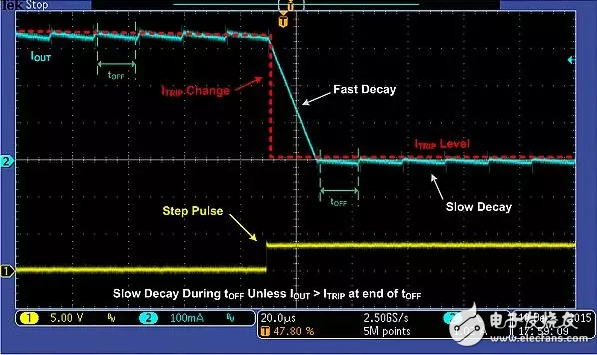
图6:MP6500的自动衰减模式(step跳变时)。
如果电源电压高,电感值低,或所需的峰值电流幅值很低,电流很有可能高于设定值。由于blanking TIme,每个PWM周期都会有一个最小导通时间,此时许多传统的步进电机驱动器无法控制绕组电流。如果发生这种情况,MP6500会不断采用快衰退模式来保证绕组电流一直不超过设定值(见图7)。
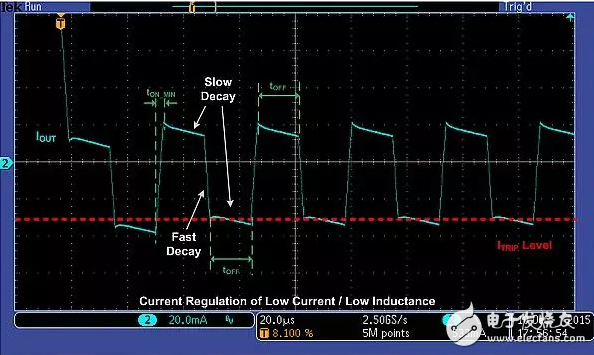
图7: MP6500的自动衰减模式(低电流情况下)。
这种自适应衰减模式与只使用慢衰减模式相比,平均电流的变化比较小。由于快速衰减模式只用来控制驱动电流低于设定值,误差比在整个PWM关断时间采用快衰减模式要小的多。
这种控制方法的优点是,对于不同的电机和电源电压,用户不需要做任何系统调整,衰减模式是完全自动调整的。 而传统的步进电机驱动,对于不同应用,必须调整衰减模式甚至PWM关断时间,以得到最好的运行质量。
使用了这种电流调节方法,MP6500可以确保整个周期的平均绕组电流都准确稳定(见图8),明显改善了电机的运行质量。
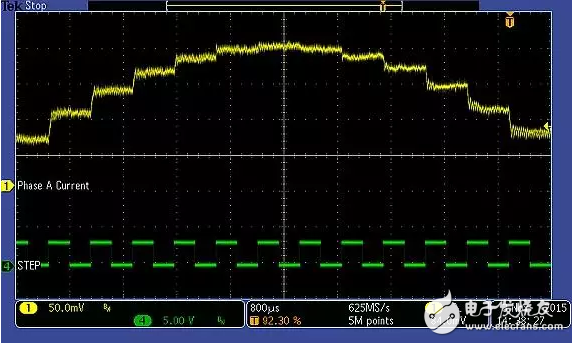
图8:MP6500输出电流波形
电机运行质量测量
步进电机的运行质量,往往很难准确的量化评估。通常,靠人的眼睛,耳朵,手来判断相对位置,噪声和振动的情况。这些方法都很难精确测量每个细分段的位置精度。一个步距角1.8°步进电机,每八分之一步对应的旋转角度为0.225°,非常小。 在电机运动时,比较容易的测试方法是时域测量, 定位误差会转化为速度的变化。速度随时间的变化可以用示波器测量出来。为了实现这些测量,测试设备需要一个高分辨率的光学编码器和与步进电机支架组装在一起的磁粉制动器。
步进电机选用的是一个用于小型工业设备或3D打印机的XY位移平台的典型电机:1.8°步距角NEMA 23步进电机,电感量为2.5mh,额定电流2.8A。
要进行运行质量测量,还需要一个频率电压转换器(Coco Research KAZ-723)去处理光电编码器的输出信号,转化为电压信号后就可以在示波器和频谱分析仪上分析处理。这个电压信号实时代表了不断更新的电机转速。
测试设备如图9,图10所示。
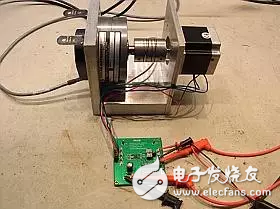
图9:电机试验台。

图10:kaz-723 频率电压转换器。
为了检测整个测试系统的运行和了解所用电机和测试装置的固有缺陷,在电机两个线圈上加上相位差90度的正弦波电流。两相电流和代表电机转速的电压信号,如图11所示。
频率电压转换器的输出显示电机瞬时速度的变化是周期性的,与驱动电流波形同步。这个速度变化很可能是由于电机本身的磁场和机械构造的缺陷引起的,也部分原因可能是编码器,测试机架,或驱动电流的谐波失真分量。
那么,图11就是此测试设置下
步进电机 相关文章:
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 德州仪器步进电机控制方案(04-12)