这些企业的ADAS应用设计,真是火爆了!
之间的多样化接口。"赛灵思公司亚太区新兴业务拓展经理黄文杰在接受采访时表示。黄文杰在解释说,为了提供ADAS的灵活性及便于产品更新换代,业界必须通过提高集成度、优化性能、创建通用ADAS优化平台来实现适当尺寸的底层组件,确保支持不同的应用,而且能够实现定制。因为高度集成的全面可编程单芯片平台不仅能够降低单位成本,提高规模经济效益,缩短开发周期,而且能改变ADAS发展的格局,最终确保ADAS得到普及。
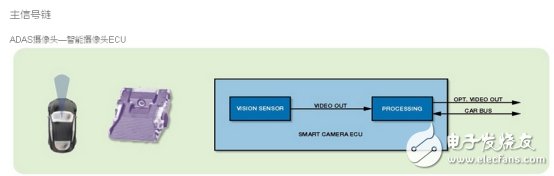
ADI视觉ADAS解决方案
与赛灵思采用FPGA作为核心开发器件不同,ADI的ADAS主要核心器件是DSP(digital signal processor,即数字信号处理器)。ADI基于视觉的ADAS系统提供车道偏离警告、交通信号识别、智能前灯控制、物体检测/分类、行人检测等功能。基于雷达的系统具有类似的功能,此外还可提供前/后停车帮辅助、安全车距预警、车道变换辅助、盲点检测、碰撞缓冲刹车系统、全速范围自适应巡航控制等功能。基于视觉的高级驾驶员辅助系统(ADAS)的核心,是通过视觉或者雷达技术检测车辆周围的环境信息,经DSP处理,然后采取相应的预警或干预措施。有的只是警告驾驶员,有的则采取一些干预驾驶的措施如刹车等。通过安装后视、前视、侧视摄像头和视觉处理ECU,可以实现多种功能来帮助驾驶员提前防范风险。ADAS技术应用的不断普及,不仅仅是由于汽车厂商之间竞争的原因,政府的规章制度也是一个重要因素。美国国家高速运输安全管理局正在制定强制安装后视摄像机的政策。
与此同时,2014年欧洲新车安全评鉴协会(Euro NCAP)自动紧急刹车系统计划等有关后视摄像头的新法规要求也给汽车产业带来了更大的压力,要求设法在不增加单位车辆材料清单(BOM)成本的情况下实现计算和网络强度很高的系统。对ADAS系统的OEM汽车厂商和以及汽车电子产品供应商的系统架构设计人员来说,这就需要降低成本,同时还要想办法满足系统要求,支持智能网络和实时图像-视觉功能。ADI提供的首款专用ADAS视觉处理器具有比较高的性能功耗比和性价比,并且满足NCAP的新行人保护要求。ADAS视觉应用这一细分市场一旦大规模部署,所需要的就不仅仅是处理能力。为此,ADI有针对性的两款专用的ADAS视觉处理器(BF608/9),支持并行处理多达5种功能,图像处理能力达百万像素,帧速率为30FPS(帧/秒),功耗不到1.3W@105°C。由于目标设定为2014年及以后的市场部署,ADI集成了ISO26262兼容硬件支持能力。功能系统中,BF60x通常最多可将系统成本降低30%。
富士通360度全景系统方案
富士通的ADAS技术主要涉及透过摄像头和传感器的结合,实现图像识别辅助和接近目标检测,应用的领域主要有360度三维立体全景辅助、可视停车辅助、驾驶盲区监控、安全开车门以及车行驶方向周围的障碍物和行人的识别。目前,富士通的合作伙伴采用Emerald核心芯片MB86R11可以提供turnkey 量产方案。富士通的360度全景系统方案,采用3D的建模和独特图形合成算法,围绕车身四周可构建多个虚拟三维立体视角,结合车身CAN总线做到自动视角动画的缩放和切换。作为驾驶员的视觉辅助,汽车上配备了4个摄像机影像的合成系统,但是以往的技术只能做二维图像合成,因而只能进行特定视角的显示。
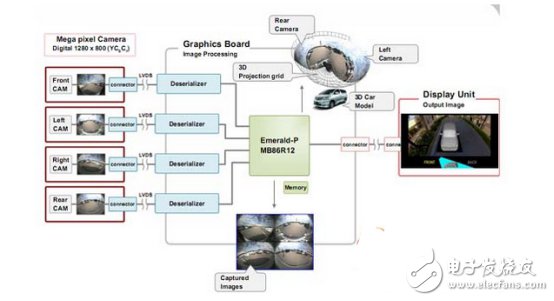
而360度全景系统方案能将来自4个摄像机的影像合成到三维模型上,从而可以从任意视角显示全方位场景。以往的系统将摄像机影像投影到二维平面上,只能表现从上方观看的俯视图,有时难以分辨周围的车辆和行人。而360度全景系统,则是将影像投影在立体曲面上,可以任意变换观看角度,能完整表现出希望看到的场景,从而提高了可辨识性。在接近目标图像检测的技术方面,富士通运用灵活的时间帧来采集2个不同的图形,能够检测大约60米元的目标,传统的图形识别只能做到20米。富士通的ADAS应用包括可视辅助和识别辅助。可视辅助给驾驶人员提供更为立体的广泛视角范围,减少视角盲区范围;识别辅助对后方或者侧面接近的目标进行检测,提醒驾驶人员变道的潜在危险,也可以做到停车后提示是否适合安全开车门。
瑞萨电子ADAS方案
俯视监控提供了汽车周围360度的视景,利用图像识别技术是其正逐步发展成为环绕检测系统。SH7766是一款图像识别SoC,搭载了SH-4A内核、失真校正引擎、图形、图像识别引擎以及其他环绕检测系统所需的硬件引擎。
单芯片实现汽车俯视系统,图像识别SoC SH7766现高性能3D图形引擎,支持逼真的3D图像 IMP-X2图像识别引擎 六个视频输入通道,包括了四个集成NTSC ADC的通道,从而降低了系统成本。
- 2016年安全设备系统行业应用文章精选(02-23)
- 2016年音视频及家电行业应用文章精选(03-01)
- 2016通信网络频道热文Top20(02-16)
- 2016年汽车电子行业应用文章精选(02-17)
- 新一代蓝牙标准5.0,IOT方案最佳选择!(02-17)
- 2016年制造封装行业应用文章精选(03-01)