挣脱“二向箔”,三维触控将带来人机交互方式的革新
位置,从而成为AR人机交互的基础技术。在AR技术普及后,不仅仅手机、电脑会用到三维触摸屏,甚至日常家具(如桌子,橱柜)的表面都可能需要支持三维触摸技术,从而让用户随时随地能使用AR。

增强现实将计算机图像与现实结合在一起(左),AR与用户交互方式需要能精确地捕捉用户手的三维位置(右)
三维触摸屏候选技术
目前三维触摸屏技术尚处于探索阶段。现在最有希望商用的三维触摸屏技术有两种,一种基于毫米波雷达,另一种基于电容感应。
基于毫米波雷达技术的三维触摸技术以Google的Project Soli为代表。今年五月份,Google正式发布了代号为Project Soli的三维触控模组。
那么,Project Soli的毫米波雷达是如何实现三维触控的呢?首先我们要清楚雷达的原理。
大家一定都看到过探照灯:在漆黑的天空中,探照灯的光束方向上的物体位置可以被看得一清二楚。探照灯通过不停地旋转改变光束照射方向,于是整个天空中所有方向上物体的位置就可以被一一探知。雷达也是一样,不过雷达发射的不是肉眼可以看到的光束,而是电磁波波束,并通过检测电路来探知波束方向上物体的位置。很显然,雷达也可以用在三维触控上:手就是需要检测的物体,通过雷达我们可以实时监控手在空间中的位置并让设备做出相应反应从而实现三维的人机交互,这也是Project Soli的原理。
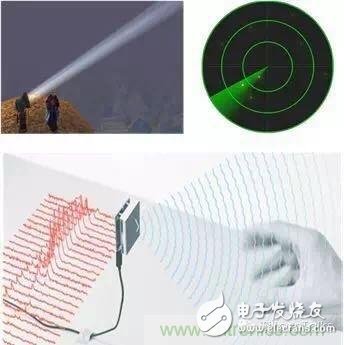
探照灯通过改变光束方向来探测目标(左上),雷达通过改变波束方向来扫描目标(右上),Project Soli利用和雷达原理来探测手的位置从而实现三维触控(下)
那么什么是毫米波雷达呢?
它与电视里出现的那种巨大的雷达有什么区别呢?原来,雷达的分辨率和它发射电磁波的波长有关,发射的电磁波波长越短则分辨率越好,也即对物体探测位置越精确。但是,电磁波波长越短则在空气中的衰减会越大,因此如果物体距离雷达很远就会检测不到。
因此物体探测精度和探测距离是一对矛盾。
传统军用和警用雷达使用的是微波波段,因为传统雷达需要检测的物体通常尺寸很大,微波波段能做到大约10cm级别的分辨精度已经很够用了,一方面传统雷达需要有足够的探测距离才能满足使用需求。然而,10cm级别的分辨精度对于三维触控来说完全不够用。
另一方面,三维触控所需要检测的距离很短,通常手距离触摸屏的距离不会超过20cm。
最后,三维触控模组的体积必须足够小。
因此,Project Soli使用了波长为毫米数量级的毫米波雷达,理论上可以实现毫米级别的分辨精度。该雷达可以集成到硬币大小的芯片中,从而可以安装在各类设备上。
下图是Project Soli使用的毫米波雷达传感芯片。
芯片大小约为8mm x 10mm,上面白色的小点应当是用来把芯片固定到主板上的焊锡球(bump)。芯片上还有天线阵列(绿色框内)用来实现波束成型。根据天线的大小我们可以估计出Project Soli使用的毫米波雷达波长大约在2mm-5mm之间。

毫米波雷达用来实现三维触控可以达到很高的精度。然而,它的劣势在于功耗太大。目前即使最领先的毫米波雷达芯片也至少需要100mW以上的功耗,因此用在移动设备上会导致电池很快就用完了。这样一来,毫米波雷达触控比较适合使用在电源不是问题的设备上,例如大型游戏机或者电视机上的三维触控。
另一种非常有前景的三维触控技术是电容感应技术。毫米波雷达技术利用的是动态电磁波,而电容感应技术利用的是静电场。电容感应型三维触控技术是目前电容触摸屏的增强版:电容触摸屏可以感应到与屏幕接触的手的位置,而电容感应式三维触控技术则增强了感应范围,在手尚未接触到屏幕时就能感应到手在空间中的三维位置,从而实现三维触控。
为了理解电容感应式三维触控的原理,我们不妨想象有许多热传感器组成的阵列,而传感器阵列上方有一个火苗(热源)。根据传感器的相对温度分布(即哪里温度比较高,哪里温度比较低)我们可以知道火苗在哪一个传感器上方(即火苗的二维位置),根据传感器的绝对温度(即传感器探测到的绝对温度有多高)我们可以知道火苗离传感器有多远(即火苗在空间中第三维的位置)。结合这两条信息我们可以得到火苗在空间中的三维位置。
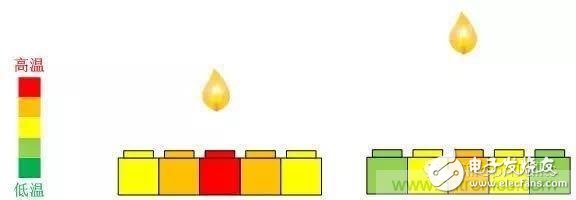
热传感器阵列可以通过相对温度分布和绝对温度来判断火苗在三维空间中的位置
电容传感式三维触控的原理也是这样,只不过这里探测的不是火苗带来的温度改变而是手指带来的静电场改变。通过探测哪一个电容传感器探测到的静电场改变最大我们可以感应到手指的二维位置
- 能量收集器于所在环境产生电能,无线传感器无需使用电池(08-23)
- 针对能量收集型无线远程传感器网络的实用电源管理设计(11-29)
- 智能防窃电系统的设计(03-25)
- 一种无线传感器的能量收集的实现(08-31)
- 放电少、放置10年依然可用的锂亚硫酰氯电池(07-31)
- 面向国防应用的安全和可靠无线传感器网络(11-06)