如何估计电机能量回馈和VM电源泵升
电机能量回馈问题是一个发生在电机驱动系统中的常见问题。许多设计人员不得不选择相当于额定电压水平两倍的电机电源电压(VM)等级,这会增加系统成本。幸运的是,如果您能先估计泵升幅度,您就可以选择恰好的VM裕度。今天,介绍一种估计泵升水平的方法。
VM泵升波形
图1展示了在减速过程中由能量回馈引起的典型VM泵升波形。当输入PWM(脉宽调制)占空比从99%变为70%时,VM电压从24V被泵升至32V。(在TI电机驱动器装置DRV8840上进行的测试,DRV8840是一种5A的有刷直流 (DC) 电机驱动器。)
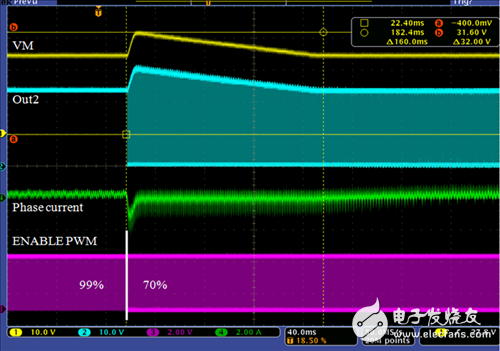
图1:再生电能现象和VM泵升现象
泵升机制
在这里我们需要一些DC/DC电源管理背景资料以了解泵升机制。因此,让我们来看看典型的降压 — 升压电路是如何工作的;请参阅图2。有趣的是,在PWM控制过程中使用H桥驱动电机时,您能同时看到降压和升压的过程。如图3所示,在PWM的开通时间段,它是一个典型的降压电路。而图4中,在PWM的断开时间段,对反电动势(EMF)而言,则充当升压机制中的输入电源。
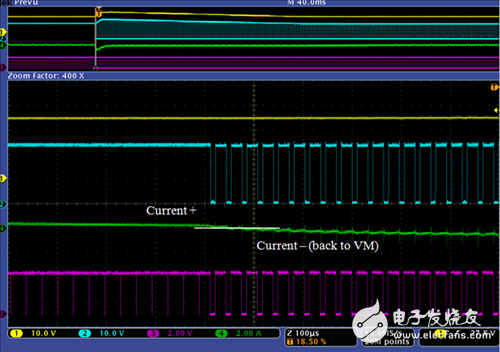
图2:降压和升压电路
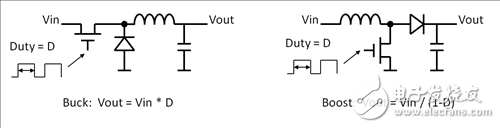
图3:降压拓扑结构
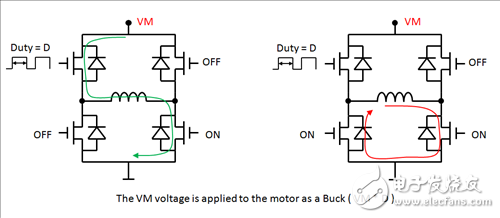
图4:升压拓扑结构
该有刷DC电机的运行模式可表示为方程式(1)。

在正常驱动条件下,PWM占空比 = D,该电机将以方程式(2)所示电压VDRV驱动的速度运行。
根据方程式(1),我们应能估算出
升压效应将使VBST为
根据方程式(2)、(3)、(4),我们可估算出
因此,在正常运行状态下不存在VM泵升。
当PWM占空比从D1减小至D2时,就在发生减小的时间点之前,我们可估算出

占空比刚刚减小后,电机的速度不能突然改变,因此基于新的占空比D2计算出VBST是

根据方程式(6)、(7),我们可得出
当K * D1/ D2 》 1时,我们可估算出
VBST将比VVM高,并引起泵升效应。假设K接近1,那么任何时候您减小占空比并使D2 《 D1,VM泵升均会发生。例如,要是您让占空比从100%减至50%,则VBST = 2 * VM。要是您让占空比从90%减至30%,那么您将看到泵升电压是VM的3倍。
泵升测试
在实践中,VM泵升不能像上述方程式(8)估算的那么高,因为电源和VM电容器会有吸收电能的能力,这有助于降低泵升水平。为了验证该估算方法,我们可添加一个从电源到VM的二极管Ts1(如图5所示),力图在没有电源吸收电能的情况下获得纯泵升效应。
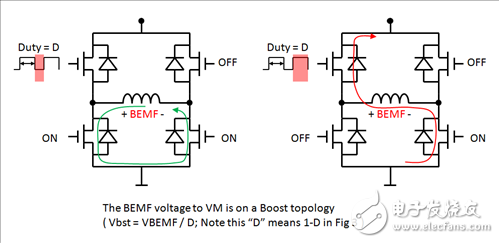
图5:泵升电压测试结果
表1和图6展示了测试结果。(注意:某些泵升电压超过了DRV8840产品说明书的VM规范标准;这仅适用于测试。绝不建议该器件在超过规范标准的条件下使用。)
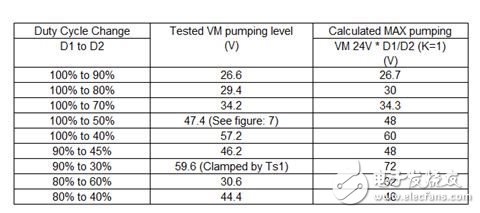
表1:泵升电压的测试结果和计算结果对比
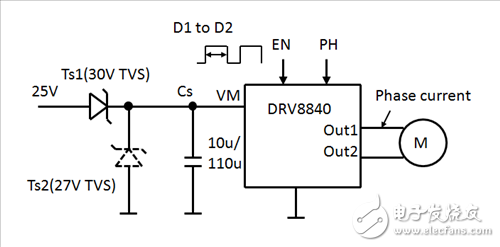
图6:测试结果图
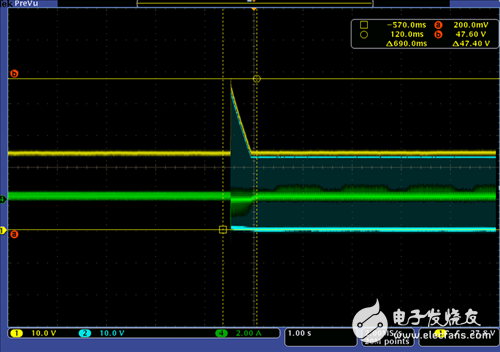
图7:当PWM占空比从100%减至50%时的VM泵升(测试包含图5上的Ts1)
降低电压泵升效应
有两种方法可控制VM泵升:
采用快速衰减模式。当DRV8840处于快速衰减模式的时候,图4所示的升压拓扑结构就不复存在了。通常情况下,反电动势EMF将一直低于VM电压,因此根本不会发生VM泵升。但是这种情况下,减速至目标速度,将需要较长的时间,如图8所示。
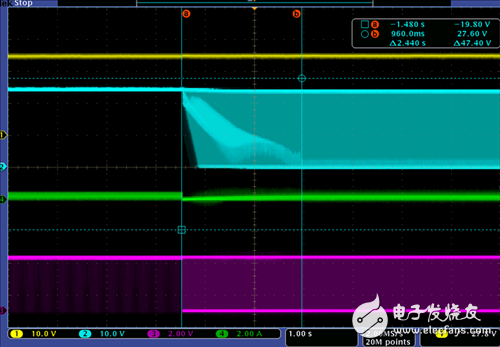
图8:快速衰减时没有VM泵升
使用瞬态电压抑制器(TVS)来强行限制VM泵升。如果您选择钳位电压比额定VM等级稍高的TVS并作为图5所示的Ts2放置,那么它将能强行限制 VM泵升(见图9)。笔者用了一个27V的TVS,VM泵升被有效地限制在29.6V。该TVS还充当了动态制动装置,使得电机能快速减速。
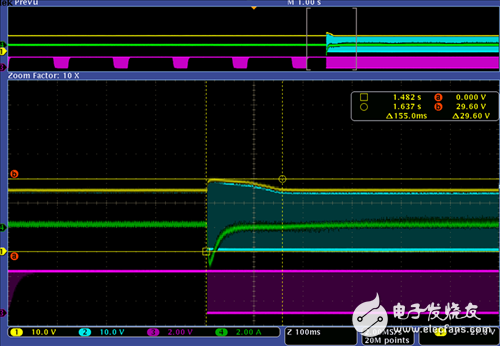
图9
总结
在电机减速过程中,VM泵升实际上是动能回馈并转换为电能的指示。其特性如下:
PWM驱动中包含的泵升电路拓扑结构是为什么反电动势能即使在小于电源电压的情况下也能迫使电流回到VM电源的关键因素。在减速阶段,若使用快速衰减模式则不会引起VM泵升,但电机需要相对较长的时间才能减慢速度。
TVS钳位法或其它动态制动法可有效解决VM泵升过高的问题,在降低VM泵升效应的同时又能保持较快的减速速度。
- 变频器对电机影响的解决方法(08-10)
- 发电机组轴电流故障诊断设计方案(12-22)
- 超声波电机测试电源设计方案(12-27)
- 天然气发电机在通信基站中的应用(04-20)
- UPS供电系统与发电机组的匹配兼容性(10-23)
- 小型风力发电机设计(01-17)