一种用于FPGA的改进算法弱化了方波重影
0 引言
DDS(Direct Digital Frequency Synthesis)频率合成器能够很方便地输出任意波形,方波作为最常用波形之一,具有其特殊性。但输出的方波存在明显的重影现象直接影响了方波的质量。
1 方波重影出现的原因
假设系统时钟频率为200 MHz,以输出3 MHz方波为例,从模拟示波器观察到的结果如图1所示。
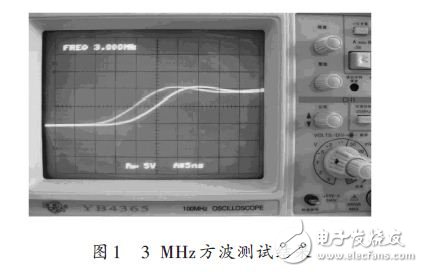
图1中存在明显的双边沿现象,且两条上升沿的间距为5 ns,刚好等于系统时钟的周期。这种现象可称为方波重影。
根据DDS的工作原理可知,相位序列具有周期性。
在相位序列的一个周期内,相位累加器会溢出若干次,并且每次溢出后的残留量都不一样。当残留量足够大时,再次发生溢出所需的累加次数会减少一次。累加次数的减少,意味着方波的周期变小。不同周期的方波叠加在一起,便出现重影现象。
使用Matlab模拟DDS生成方波的过程,可以得到更直观的认识,如图2所示。
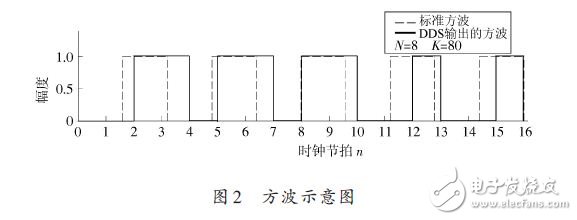
按照图2中的参数设置,方波的周期等于:

从图2可以看出,为了输出周期为3.2Tc 的方波,在相位序列的一个周期内,DDS 频率合成器的实际输出为:一个周期为4Tc 且占空比为50%的方波,两个周期为3Tc 且占空比为75%的方波,两个周期为3Tc 且占空比为25%的方波。从平均的意义上看,刚好组成周期为3.2Tc 且占空比为50%的方波。因此,DDS 频率合成器输出的方波不仅周期在波动,而且占空比也发生波动。
如果将DDS 频率合成器看成分频器,在满足奈奎斯特采样定理[4]的条件下,可以得出如下结论:输出正弦波等连续信号时,DDS可以实现任意比例的分频;输出方波等存在跳变沿的信号时,这类信号的周期只能是系统时钟周期的整数倍,否则出现重影。
2 方波改进算法的研究与实现
为了解决方波重影问题,可从时域的角度分析。将若干个不同周期的方波叠加到一起,可得示意图如图3所示。
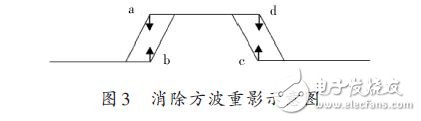
图3 中,使a 点和d 点向下抖动,使b 点和c 点向上抖动,多次叠加后可有效弱化方波重影,甚至彻底消除。但是,如何准确地判断a、b、c、d 四个点,成为实现这一方法的最大障碍。
仔细观察图3和图2,引入时钟节拍的概念,便能找到依据判断a、b、c、d四个点。首先,定义方波的周期和上升沿时刻,以50%占空比为例,这两个数值可分别表示为:
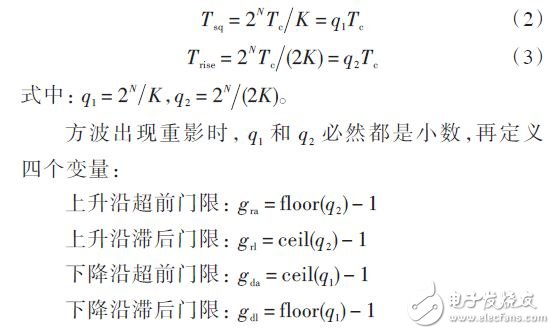
其中,ceil表示朝正无穷方向取整,floor表示朝负无穷方向取整,均为Matlab运算符[5]。
当系统时钟的频率为200 MHz时,以输出3 MHz方波为例,计算结果如表1所示。
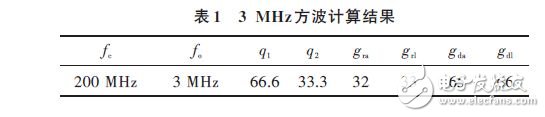
类似于图3,3 MHz方波的示意图如图4所示。
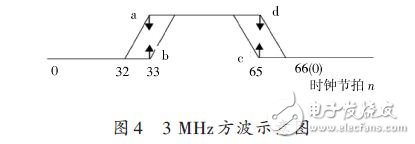
从图4 可以看出,a 点和b 点发生在时钟节拍为33的位置,c点和d点发生在时钟节拍为65的位置。当出现c点时,意味着本次方波的周期较小,下一个时钟节根据图3 的规律,在时钟节拍为grl 和gda 的位置,利用原始方波信号的高低电平信息,就能得到a、b、c、d四个点。假设DAC的位数为14位,方波改进算法的实现过程可分为以下三个步骤:
第一步,定义一个计数器,并以相位累加器的进位输出信号作为清零信号,即相位累加器每溢出一次,该计数器就清零一次。因此,该计数器的计数值就表示图4中的时钟节拍。
第二步,定义一个状态机,假设计数器的计数值为num,简化后的状态转移图如图5所示。
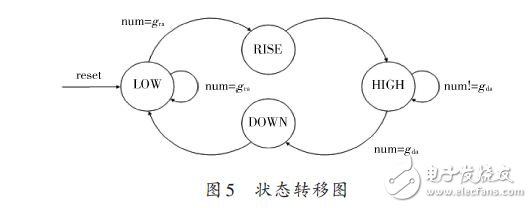
状态RISE标记的时钟节拍是grl,处于此状态时,如果原始方波信号为高电平,便得到a点;如果原始方波信号为低电平,便得到b点。状态DOWN标记的时钟节拍是gda,处于此状态时,如果原始方波信号为低电平,便得到c点;如果原始方波信号为高电平,便得到d点。
第三步,定义一个随机变量random,random的变化范围是0~2 048,可通过11位m序列实现之。使用verilog语言的位拼接运算符[6],在a 点和d 点将送给DAC 的数据定义为10 240 加random,即"{3‘b101,random}";在b 点和c 点将送给DAC 的数据定义为4 096 加random,即"{3’b010,random}"。
3 测试与总结
使用新的方波算法后,可得测试结果如图6所示。
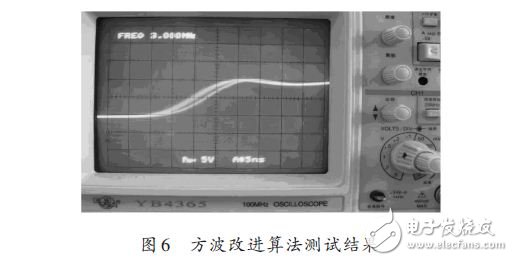
对比图6和图1可以看出,方波重影的宽度从5 ns缩短至3 ns,并且上升沿呈实心状,不再由两条边沿组成。
另一方面,图6和图1中,方波的上升时间均为15 ns左右,这说明方波改进算法并没有导致上升时间的增加。
- 基于SOPC和DDS IP核的可重构信号源设计与实现(11-03)
- 国家电网单相表DDS-GW解决方案(06-19)
- 一种新型的正弦信号发生器的设计与实现(04-23)
- 基于仪器集成的幅频特性测量仪设计方案(09-11)
- 基于DDS芯片的全数控函数信号发生器的设计与实现(06-24)
- FPGA和DDS在信号源中的应用(05-02)