带远程监控的路灯照明节电控制系统设计
。设置该回差是为了保证触点开关在输入电压波动频繁时不会随之出现频繁跳变。
1.3 采样方案
针对该系统的电网电压幅值变化不是很快的特点,该路灯控制器的采样速度和采样精度的要求都不需要很高。而微控制器C8051F310自带的10位AD转换器本身的精度就能满足系统要求。信号经过AD转换之后,再由微处理器计算相应电压的有效值,并进一步进行判断即可。该设计结构简单、成本低,且足够满足采样速度和采样精度的要求。
A/D转换器的转换精度,是由其参考电压和输出字段长度共同决定的。所谓转换精度是指一个A/D转换器可以对最小电压变化的监测能力。实际上,转换精度就是A/D转换器的最小步进电压,只需将MD转换器的参考电压与该转换器转换值的数量相除,就可以得到该电压值。
由于C8051F330采用3.3 V作为基准电压,故其转换精度为3.3/1024,即3.22 mV,完全可以满足本系统的精度要求。
1.4 远程通讯控制方案
远程通信是指多台路灯控制器与PC机之间的通信,便于用户对分布在各处的路灯控制器的状态进行监控,本系统通过C8051F310自带的UART口和PC机的串口进行通信,以将检测到的各种状态信息传给上位机(如电网的电压,A、B、C各相的电流,以及路灯控制器所处的各个状态等等),而用户则可根据上位机的软件来选择要监控的路灯控制器,然后根据其状态来发出各种控制命令,如旁路或者选择节能所处的档位。
鉴于采用的是一台PC机对多台路灯控制器的方式,故可采用侦听方式来规定其通信协议,即给每一台控制器分配一个通信地址。通信开始之前,主机先发送通信地址,每一台控制器都接收这个地址,然后与自身的地址相比较,地址匹配的路灯控制器开始与主机通信,其它的保持侦听状态。这样,用户就可方便地对任何一台控制器进行监控。
综合考虑总线的传输距离和抗干扰能力等因素,本设计在控制板上采用RS-485接口,并采用差分方式传输信号,故其抗共模干扰的能力很强。
2 硬件设计
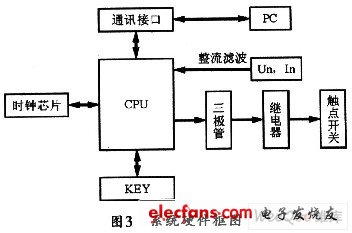
本节电控制系统的硬件部分主要包括微处理机、电压检测电路、电流检测电路、触点开关驱动电路、时钟及通讯接口电路等。当电网电压经整流滤波电路被采集到微控制器后,微控制器将通过自带的AD转换电路进行AD转换,然后通过运算来确定此时需闭合的变压器副边开关位置,同时发出命令使相应继电器驱动与其对应的触点开关闭合,从而实现其基本功能。KEY电路包含外部的一些手动逻辑控制。图3所示是本系统的硬件电路框图。
2.1 电压检测电路
本系统中的电压检测电路框图如图4所示。该电路中包括有各种信号调理电路。其电网电压经220 V/7.5 V变压器之后,再通过运放组成的比例放大器调整其幅值,然后通过全波整流电路将其变成直流,再经过RC滤波电路之后进入微控制器进行AD采样。
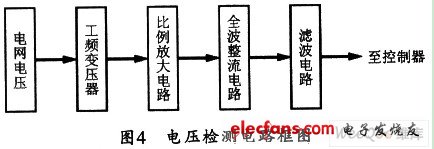
电流检测电路的结构与电压检测电路基本相同,只不过电流是通过电流互感器之后,再转换成电压信号,其信号调理过程基本一致。
2.2 触点开关驱动电路
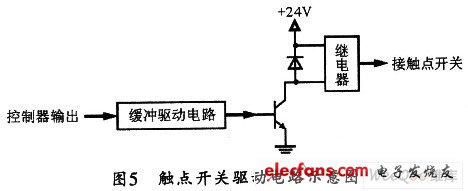
图5所示是触点开关驱动电路的示意图。在图5中,微控制器的输出可通过驱动电路接到三极管,以控制其通和断,并由此来控制继电器线圈的通和断,再通过继电器控制自耦变压器触点开关的通和断。
2.3 通信接口电路
本节电器和PC机的通信采取串口通信,使用的是微控制器的UART口,其中RX0为微控制器接收信号,Txo为微控制器发送信号。UART口通过专用的RS485芯片将信号发送到总线或从总线上接收信号。其电路图如图6所示。
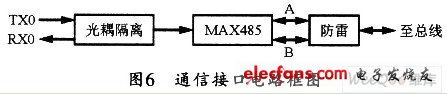
图中的光耦起到了隔离作用,用于防止微控制器被其它信号干扰,防雷一般采用的是瞬态二极管。
3 软件设计
图7所示是本系统的软件结构流程图。当系统开机之后,微控制器首先初始化,然后启动内部定时器进行电流和电压采样。如果电流过流,控制器将使整个系统旁路,以免烧毁元器件,之后,微控制器再对采集到的电网电压进行分析,以判断自耦变压器应该处在什么档位。并结合PC机传给控制器的命令来综合分析应该采取的动作。

通信程序应保障计算机与单片机之间的联系畅通并能实现多机通信。当开机之后,连接在总线上的每一台设备都将分配一个通信地址。计算机要与哪一台设备通信,可以通过控制界面进行选择,从而监控每台设备的信息,并可通过远程发送控制命令。此时,总线上的每台设备都接收到计算机发出的信息,而只有通信地址与信息中包含的地址相匹配的设备才可以做出相关的动作,同时获得向计算机发送自身状态信息的权利。
4 结束语
实验表明,该节电装置实现起来简单方便,可靠
- 电力线通信在路灯照明自动化中的应用(02-26)
- 路灯照明智能控制系统方案(02-11)
- 一种柴油发电机组远程监控平台的实现(09-05)
- 基于GSM网络的UPS监控系统设计(10-15)
- 基于无线传感器网络的嵌入式远程测控系统研究(10-17)
- 基于CDMA和CAN总线的车辆远程故障诊断系统(02-20)