基于ARM的汽车黑匣子设计
,因为对它们而言,电流损耗是重要的设计考虑。因此,本设计选用MC33993 作为多路开关检测接口电路。
系统中MC33993 采用SPI 与MCU 实现硬件连接,如图2 所示:当外部有开关量输入,状态发生改变时, MC33993 会发出中断信号IN T 给TMS470R1A256 , TMS470R1A256 响应中断读取开关量输入状态,从而提高MCU 的工作效率。

图2 MC33993 与TMS470R1A256 的硬件连接。
3. 3 TMS470R1A256 与FM24L256 之间的通信
在汽车行驶记录仪行业中,数据安全保存是最重要的。随着记录仪的发展,保存的数据量越来越大,这就需要大容量的存储器,而大容量的EEPROM 指标不是很高,尤其是擦写次数和速度影响电能表自身的质量。FM24L256 是由RAMTRON公司研制的新型存储器,它的核心技术是铁电晶体材料,拥有随即存取记忆体和非易失性存贮产品的特性。FM24L256 和A T24C256 容量等同,总线结构兼容, 但FM24L256 的性能指标远大于A T24C256 。
FM24L256 的通讯方式是双向两线协议,脚位少,占用线路板空间小。图3 描述了FM24L256 与MCU 硬件连接方式。
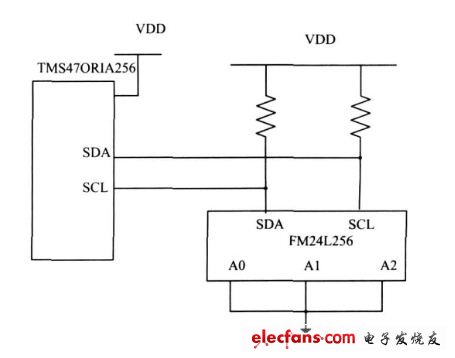
图3 FM24L256 与TMS470RIA256 的硬件连接
3. 4 TMS470R1A256 与SL811HS 之间的通信
本系统中USB 的主机通过主机控制器与USB设备进行数据传输。USB 主机应当具有: 检测USB 设备的插拔;管理USB 主机与USB 设备之间的控制流;管理USB 主机与设备间的数据流和收集USB 主机的状态等功能。
SL811HS 是CYPRESS 公司生产的、可支持全速数据传输的USB 控制芯片,且内含USB 主从控制器,支持全速、低速数据传输,并能自动识别低速或全速设备。SL811HS 所提供的接口遵从USB1. 1 标准,可与TMS470R1A256 微处理器相连。SL811HS 的数据接口与微处理器进行接口可提供8 位数据I/ O 或双向DMA 通道,并能以从机操作方式支持DMA 数据传输。SL811HS 内部有一个256 字节的RAM ,可用做控制寄存器或数据缓冲器。SL811HS 与TMS470R1A256 的硬件连接方式如图4 所示。

图4 SL811HS 与TMS470R1A256 的硬件连接。
3. 5 TMS470R1A256 与HOLUXGR285 之间的通信
HOLUXGR285 智能型卫星接收模组,采用美国瑟孚公司所设计的第二代卫星定位接收芯片,是一个完整的卫星定位接收器。具备全方位功能,能满足专业定位的严格要求与个人消费需求。适用范围从汽车导航、保安系统、地图制作等。
HOLUXGR285 通过RS2232 , TTL 与其它电子设备沟通,并以内建充电电池,存贮卫星资料。
其耗电量低,且能同时追踪12 颗定位卫星的讯号,每0. 1 秒接收一次,每秒更新一次定位信息。
HOLUXGR285 与TMS470R1A256 均为3.3V 供电,故无需电平转换便可通过串行通讯口实现数据交换。硬件连接如图5 所示。
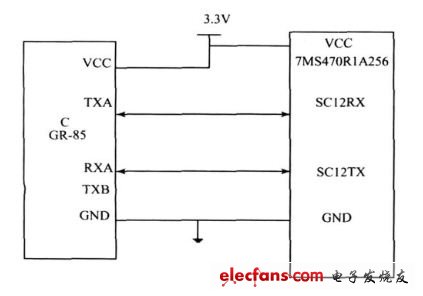
图5 HOLUXGR285 与TMS470R1A256 的硬件连接
3. 6 TMS470R1A256 与Benq M22 之间的通信
Benq M22 是一款内嵌TCP/ IP 协议栈,支持GSM/ GPRS CLASS4 , 可工作在EGSM900MHz ,DCS 1800MHz ,PCS 1900MHz ,可以支持数据业务的透明和非透明传输。从封装上来说,M22 使用连接座式接口,模块上自带天线MMCX 接头。由于支持GPRS 甚至拥有嵌入式的TCP/ IP ,可以用于实时性要求较高,数据量相对较大,传输速度相对较快的汽车行驶记录仪中。
Benq M22 和上位机的通讯数据接口为UART ,电平为TTL/ CMOS , 波特率为标称的300~115200bp s 的自适应波特率,只要是这个区间的标称波特率,模块自动识别,无须用户去干预,可以接成全串口或者半串口通讯。所谓的全串口,是指DB9 的九条线都需要接上,所谓的半串口则只接RXD , TXD 和GND 就可以进行通讯了。本系统采用半双工模式,则模块的RXD 可以直接连接TMS470R1A256 的TXD ,模块的TXD 可以直接连接TMS470 R1A256 的RXD ,如图6 所示。

图6 M22 与TMS470R1A256 硬件连接
系统软件设计e#
4 系统软件设计
系统上电后,首先对系统进行初始化。然后进行自检,自检范围包括数据存储器、时钟和I/ O 口,自检后根据自检结果在显示器上显示相关信息。
如果自检不通过,显示"自检不正常"和错误代码。
自检通过后,然后进入驾驶员身份认证,通过后,LCD 显示相关数据,等待数据刷新。系统主程序流程图如图7 所示。

图7 系统主程序流程图
4. 1 数据采集
记录仪读取到原始数据后,根据脉冲量和车辆特征系数等能够计算出总累计行驶里程、最近2 个日历天的累计行驶里程、最近360 小时内的累计行驶里程、每200 毫秒的速度和每分钟的速度。
记录仪采集的脉冲来自于速度传感器,该速度传感
- 基于ARM+FPGA的大屏幕显示器控制系统设计(06-30)
- 基于ARM和μC/OS-II的车载定位终端的设计(06-24)
- 解读物联网时代下的ARM mbed 操作系统(05-03)
- 用ARM和FPGA搭建神经网络处理器通信方案(07-19)
- ARM新一代Cortex-A73架构解析 千元机也能有高端SoC(05-06)
- 阿里巴巴将大量采用ARM处理器 Intel怎么办?(11-14)