解析嵌入式指纹检索系统设计
过程中如果某像素点的Poincare Index值为π则判定为核心点,然后便提取该点的坐标与方向场信息,记为P(Cx, Cy,θc)。
对于指纹的细节点特征,在本设计中只要求提取指纹脊线端点(Ending)和脊线分叉(Bifurcation)两种细节点。在细化的指纹图像中,这两种细节点的形态如图2和图3所示:
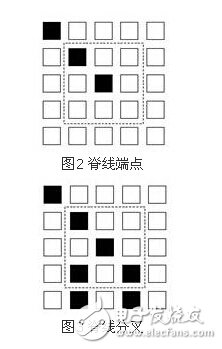
在提取指纹细节点时,首先为细化图像中的每个像素点P建立一个8邻域像素区,如图4所示。其中P1~P8为像素点P周围的邻近环绕像素点。P1~P8中黑色点的值设为1,白色点的值设为0.
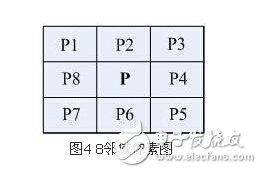
根据Crossing Number (CN)理论,在8邻域像素图中按照公式1计算像素点的CN值。例如在图2和图3中,8领域像素区域内中心点的CN值分别为1和3.

最后按上述方法对细化指纹图像中的所有像素点进行CN值计算,当CN值为1时,可判定所检测的P点为脊线端点,当CN值为3时,则可判定P点为脊线分叉点。检测到细节点之后返回该点的坐标(x,y),并根据CN的值返回细节点的类型T,然后再读取该点的方向角θ。因此,在本算法中一个指纹细节点的具体特征最后用M(x, y,θ,T)算子来表征。
2.3 指纹索引与检索算法
在得到一系列的指纹特征后,接下来就是设计指纹综合索引因子。索引因子以多维向量的形式表示,概括了一枚指纹图像的综合特征。指纹检索时通过将待查询指纹的索引因子与数据库中指纹的索引因子相比较,可快速计算得出与目标指纹相似度较高的一批候选指纹,达到有效缩减匹配范围的目的。指纹综合索引因子的设计描述如下:

公式2中Θm×n 代表将指纹图像划分为m×n块以后,由指纹图像每一子块局部脊线方向场组成的角度矩阵;Fm×n代表指纹的局部脊线频率矩阵;D代表以指纹核心点P(Cx,Cy)为中心,固定半径R内所有细节点到核心点距离的平均值;Δ则代表离核心点最近的三个细节点(设M1, M2, M3)的方向角与核心点方向角的差值,记作Δ={ω1, ω2, ω3}(ωi=θi-θc,且-π《ωi《π)。
检索开始时,设待查询指纹的综合索引因子为S{Θm×n,Fm×n,D,Δ}, 指纹数据库中的指纹综合索引因子为S’{Θ’m×n,F’m×n,D’,Δ’}。然后计算以下各项相似度分数:

其中dj=θ[j]-θ’[j], (j=1,2,…,m×n;θ[j]为指纹图像第j块的局部脊线方向角)。
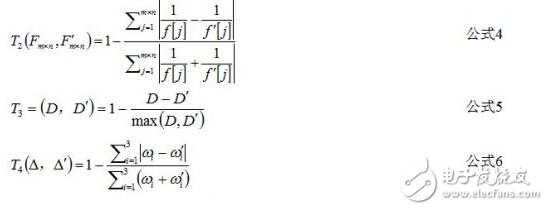
最后根据以上4个相似度值计算S和S’这两枚指纹的总体相似分数T。

公式7中μ表示各部分相似度值的权重因子。根据实际测试,在保证检索效果最佳时,μ的各项经验值分别取:μ1=0.28,μ2=0.16,μ3=0.30,μ4=0.26。检索算法按照索引因子比对法则将待查询指纹与数据库中的所有指纹进行检索对比,在遍历完整个指纹数据库以后,得到了一系列的相似度分数。最后根据设定的阈值分数,选出分数最高的一部分指纹,从而降低指纹对比识别的范围。
2.4 软件程序设计
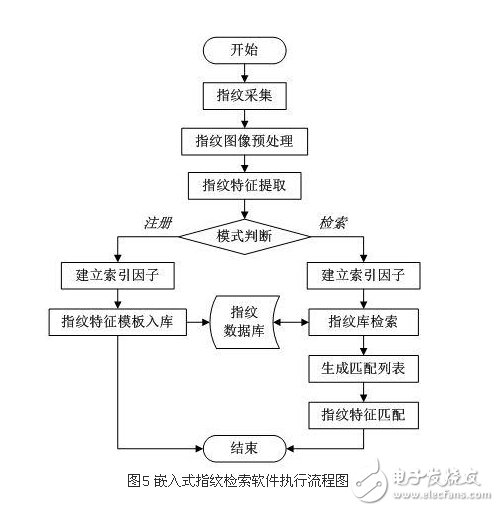
软件程序是整个指纹检索算法的映射与实现,它将算法的各个理论环节转化为实际的函数,并封装成可以在嵌入式系统下执行的功能模块。本文中嵌入式指纹检索程序实现用户指纹注册和指纹检索匹配两大功能,涵盖了指纹采集程序、指纹图像预处理程序、指纹特征提取程序、指纹索引与检索程序、指纹匹配程序等部分,其执行流程如图5所示。软件进入到执行状态后,首先按照用户指令参数进行模式判断,选择进入到指纹注册或者指纹检索状态。当选择指纹注册入库时,软件会先进行指纹图像采集,然后对图像进行预处理,接着提取出指纹的细节特征并建立指纹索引因子,最后将指纹特征模板和对应的索引因子入库保存。而当需要进行指纹检索时,系统同样会先进行指纹采集、图像预处理、特征提取和索引因子建立,然后利用索引因子进行指纹库检索,找出与查询指纹最相似的一批待匹配指纹,最后利用匹配程序对这部分指纹逐一对比,给出匹配结果。
3.嵌入式应用平台设计
为了使所设计的指纹检索算法得到实现和验证,根据嵌入式指纹检索系统的要求,还需要设计嵌入式应用平台。该平台的设计主要分为硬件系统和软件环境两部分。
3.1嵌入式硬件系统设计
本文所设计的用于指纹检索算法实现与验证的嵌入式硬件平台以东南大学自主研发的高性能微处理器SEP6200为核心控制单元。SEP6200是一颗32位的高性能应用处理器,主频达到800Mhz,有着高效的运算和
- 嵌入式系统在电源设计中的运用(09-20)
- 一种小型智能化UPS系统的嵌入式设计方案(09-16)
- 基于无线传感器网络的嵌入式远程测控系统研究(10-17)
- 嵌入式工业以太网控制器的设计和应用(10-17)
- 基于4G通信的嵌入式数据通信系统设计(10-10)
- 嵌入式CPU卡在医用便携式监护仪中的应用及设计(09-23)