物联网智能传感器的噪声与功耗
来触发每次测量事件。
周期供电是识别智能传感器节点中此类断续操作的常见方法。在两次测量事件之间,智能传感器处于低功耗(或零功耗)状态,这种技术有助于节能。图3显示了一个采用此技术的智能传感器在一个完整测量周期上的瞬时功耗。
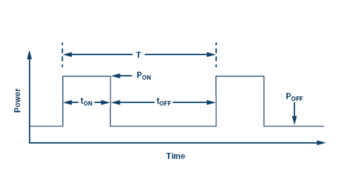
图3.基本周期供电图
方程5提供了一个利用图3所示运行特性来估算平均功耗(PAV)的简单关系式。
PON是智能传感器节点执行采样并处理数据以产生和传输相关测量结果的平均功耗。
POFF是智能传感器节点支持低功耗睡眠模式所需的平均功耗。
tON是智能传感器开启、产生测量结果、将该结果传输到物联网云、然后关闭所需的时间。
tOFF是智能传感器处于静止状态(睡眠模式或完全关断)的时间。
T为平均测量周期时间。
测量过程
在其开启时间(tON)内,智能传感器通常会经历多个不同运行状态。图4和方程6显示了一个示例序列,其将开启时间分为四段:初始化、建立、处理和通信。
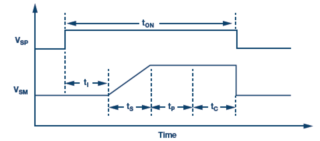
图4.智能传感器测量周期序列
TI是初始化时间,代表从施加电源(VSP)到信号链中的各器件准备好支持数据采样和处理的时间。
tS是建立时间,代表从第一个数据样本到滤波器输出(VSM)建立于足够高的精度水平的时间。
tP是处理时间,代表从滤波器建立到产生测量结果所需的时间。这可能包括应用校准公式、专门的信号处理以及根据物联网安全协议进行数据加密的时间。
tC是通信时间,代表连接云服务、发送加密数据以及支持差错校验或身份验证服务所需的时间。
建立时间影响
根据测量周期的阶段划分(图4),很明显,在滤波器建立时间这一段中,噪声可能会影响周期供电的智能传感器节点的功耗。一般而言,来自均值操作的噪声幅度的降低量与均值时间的平方根成比例,而能耗的增加量与均值时间是直接比例关系。因此,噪声幅度降低10倍会引起能耗(滤波建立期间)增加100倍!这种不成比例的权衡关系很快会对只需最少滤波(最低噪声)的传感器有利。
应用示例
考虑图5所示的微波天线平台,其停靠在一个塔式平台上。在此类通信系统中,数据链路的可靠性取决于指向角的精度。为了维持指向角,可能需要手动调整,特别是地震或其他原因扰动了天线所停靠的平台之后。此类远程维护的成本高昂,而且不能及时响应,因此,作为维护响应策略的一部分,一家天线运营商正研究利用MEMS加速度计监控天线方向变化的可行性。

图5.微波天线平台
系统架构师根据最基本的功能要求开始了此次调研:维持各天线平台的可靠通信。该系统中,可靠的数据通信要求天线指向角始终位于天线的半功率波束宽度(HPBW,参见图5)以内。因此,他们决定:如果天线在短时间内的方向变化达到天线HPBW的25%,那么就触发一次实地维护需求。
在支持此目标的误差预算内,架构师允许倾斜测量的峰值噪声为测量目标(HPBW的25%)的10%。为简明起见,架构师还指定噪声峰值等于噪声均方根(rms)值的3倍。方程7反映了所有这些限定条件,并将其简化为一个关系式,即倾斜测量中的噪声必须小于HPBW/120。

方程8是该角度噪声要求与MEMS加速度计的相同性能指标的关系式,它是通过如下方式得来:将方程7的结果代入方程2中的加速度和倾斜角基本公式。
因此,若天线的HPBW为0.7°,则加速度计的噪声必须小于100 μg才能达到现有标准。
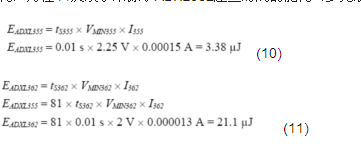
为使测量实现100 μg的不确定度,可以利用这一结果作为指标来确定各候选传感器(表1)所需的均值时间量。回顾图2可知,ADXL355将需要约0.01秒(tS355 = 0.01,参见方程10)的均值时间才能达到要求。
对于ADXL362,可以做简单的近似计算:因为其噪声是ADXL355的9倍,所以为了达到相同的目标,需要的均值时间将是ADXL355的81倍(tS362 = 81 x tS355,参见方程11)。方程10反映了来源于ADXL355建立时间的能耗,方程11反映了来源于ADXL362建立时间的能耗(参见表1)。
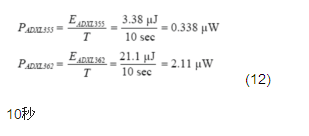
出乎意料的是,对于该噪声性能水平,最低能耗来自最低噪声的加速度计,而不是来自最低功耗的加速度计。方程12将方程10和方程11中各传感器的能耗估计值除以测量间隔(T = 10秒),得到建立时间对功耗的估计贡献。
结论
本文揭示了一种特殊情况,即最低功耗解决方案是由噪声最低的核心传感器实现的,而不是由功耗最低的传感器实现的。新兴物联网应用对性能要求严苛,而可用能源则很有限;对于那些为此类应用开发智能传感器方案的人士来说,这种解决途径可能是一个重要的启示。事实上,愿意了解并挑战哪怕是最根本的范式的人士,
- 一种低功耗宽频带LDO线性稳压电路设计(07-29)
- 低功耗 ADC:凌力尔特新方法降低整个信号链路的功耗(11-22)
- 针对低功耗的设计(04-18)
- 低功耗无线检测(07-16)
- 浅谈低功耗控制电路和程序设计思路(10-13)
- 有助于无线探头测量感应式电源的低功耗电压(11-26)