从入门到入行:高精度地图的作用
其实说到ADAS,我们首先想到的诸如ACC(自适应巡航)、LDW(车道偏离预警)、LKA(车道保持)、FCW(前车碰撞预警)。这些技术已经成熟,产品也已经量产,在近几年的高端车辆上都有配备。并且这些技术都和摄像头、毫米波雷达以及车身控制器有关,貌似和地图并没有多大关系。实际上如果结合了地图,这些功能会变得更强大。下面我们来举几个例子。
ACC实际上是由驾驶员设置一个最高的巡航速度,车上由前置的传感器,如摄像头或毫米波雷达来确认车辆正前方的可通行区域内是否有车辆。如果有车辆,则在安全制动距离内跟车,如果没有车辆,则加速到设置的巡航速度。注意这里要特别强调"车辆正前方",也就是车头的直线方向。如果是在直线行驶,或者道路曲率几乎可以视为直线的情况下,这种自适应巡航的功能是很棒的。
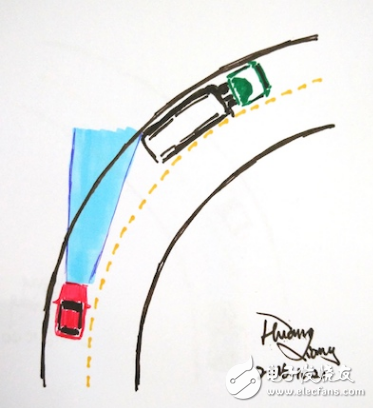
可是如果在弯道中,如下图,左侧车道中的车辆的传感器会错误的认为右方车道的车辆在自己前方,于是立即减速。可实际上车辆完全可以保持正常速度过弯。
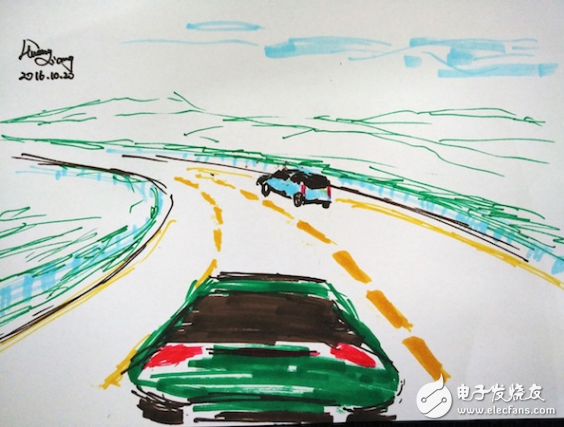
亦或者,如下图中,左侧车道的车辆根本就察觉不到自己车道内前方转弯处有一辆车,也许车辆跟上去的时候,或者前车突然紧急刹车时,已经来不及减速,继而就容易发生事故了。
除此以外,地图能提供道路的曲率,车辆在过弯道的时候可以提前减速,确保安全。或者在弯道的时候,摄像头的识别也可以针对性的变换识别模式,以提升弯道的车道线或交通参与物的检测准确性。地图也可以告知车辆何时会进入以及离开隧道,相应的摄像头可以及时调整曝光率,从而保证感知的连续性。
夜晚行车的时候,车辆也可以根据地图提供的曲率信息,在弯道处自动的左右调整车灯的照射角度,也可以根据地图提供的坡度信息,上下调整车灯的照射角度。
另一方面,目前很多摄像头识别的提供商通过摄像头来识别道路上的限速牌,来达到限速的功能,而其实地图却可以提供更好的服务。比如地图不仅可以告诉车辆在该路段上的限速,还可以在易发危险的路段,桥梁,隧道,上下匝道的时候都可以提供推荐的车速。不仅如此,还可以细化到各个车道的推荐车速。这里还需要强调下,在主动安全及自动驾驶的情况下,推荐的行驶速度比道路的限速更具有实用价值。
基于坡度数据,车辆在上坡前可以加油门,从而适当的加速,而当到达坡顶的时候减小油门,下坡的时候不加油。大陆公司做的电子地平线(Electronic Horizon)就是基于以上完成的,据说能节能达3%,该功能在商用车以及物流公司节约日常运营成本上的意义就更为突出。
也有较为初级的自动驾驶可以基于地图来实现。例如在高速公路自动驾驶场景上,直线行驶的时候或者说在车道内行驶的时候,车辆靠ADAS的主要功能完成,也就是ACC+LKA+FCW。在需要变道的时候,这个变道的指令可以是人工打个转向灯,也可以是自动驾驶系统自己决策的变道。
此时由地图提供的车线信息来确认当前车辆的区域是否可以变道。如果是要下匝道,地图可以提前一个很远的距离通知车辆前方有匝道口,此时车辆有足够的时间,借用地图数据先慢慢靠到最右侧车道,准备下匝道。而如果不下匝道,或者有汇入车流的地方,车流也可以有足够的时间先靠到最左侧的超车车道中,以保证行车的安全。
所以ADAS结合高精度地图,将大大改善自动驾驶的能力。
- 什么是高精度地图?如何应用?(10-18)
- 自动驾驶技术将在这7个方面改变我们的生活(09-10)
- 看日系三大品牌如何推进自动驾驶(02-28)
- 技术详解特斯拉Model S首起致命车祸 后续如何避免?(06-04)
- 【科普】到底什么是真正的自动驾驶汽车(07-15)
- 自动驾驶技术到底什么时候能成熟?(09-12)