希望森兰SB70变频器在位置控制中的应用
在电动机调速系统中,需要控制负载的位置或角度。简单的位置控制仅在停止时对准位置目标,高级的位置控制要求较高的动态跟踪性能。
SB70变频器内置有通用功能模块、丰富的可编程单元以及各种灵活的接口为实现位置控制提供了基础,并以此开发了点对点位置控制、脉冲频率作给定的位置控制。
SB70有2个计数器,均可实现高速正交计数功能,且计数器2的增计数输入具有电子齿轮,便于使用中位置给定的放大、缩小。下面以沈阳某钢厂的案例来介绍SB70在位置控制方面的应用情况。
一、某钢厂小车往返定位控制
沈阳某钢厂生产中,要求小车在0~8m来回行走,且要求能够在8m处停留,然后再返回;并且为方便用户使用,增加了点动功能;增加0位置附近的接近开关可以消除计数器1的累积误差;多段速1作为爬行速度可以提高定位精度。小车的运行图如图3:
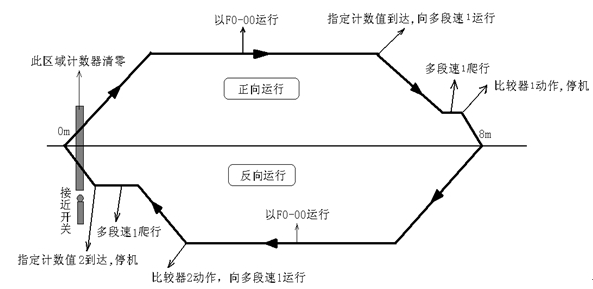
小车运行图
本方案使用了计数器的高速正交计数功能,即对正交编码器A、B通道进行增加计数,正转时增计数,反转时为减计数。当计数方向与正反转不一致时,可交换A、B通道的接线,也可通过参数Fd-03"PG方向选择"进行交换。
主要的控制思想是使小车行走的距离固定,并具有可重复性。
利用起始位置处的接近开关使计数器预置或清零,来消除小车行进的累积误差。
计数器的预置值约等于小车从0m到预置接近开关的计数值。
需要指出的是F9-14"设定计数值"要比8m处的计数值稍大5%左右,如36000。
正转时,通过调节F9-15"指定计数值"、F4-18"多段频率1"、FE-03"比较器1数字设定"来使小车停在要求的位置,如8m;必须满足F9-15/F9-14要小于FE-03的设定,如FE-03=95%,则F9-15取90%×36000=32400。
反转时,与上面的相反,Fd-20"指定计数值2"要小于比较器2的数字设定,如:FE-08"比较器2数字设定"=10%,则Fd-20=5%×36000=1800。
将多段频率1设为15Hz,实际中可修改。
运行过程如下:
当小车处于0位置时,计数值很小,计数器百分比<95%,若正转端子FWD有效,则定时器1的输出为1,起动电机正转,并加速至F0-00设定的频率,计数值增加;当计数值增加到"指定计数值"时,数字输出"指定计数值到达",通过逻辑单元3和定时器4使电机减速,并以"多段频率1"的速度爬行;计数值继续增加,计数值百分比≥95%时,比较器1输出为0,使定时器1输出为0,内部虚拟FWD端子无效,电机减速停机,调整比较器1的比较值,可使电机停在要求的位置。
反向时,与正转相反。
经现场调试及用户反映,满足实际生产需要,并具有较高的位置精度和可重复性。
- 变频器惯性输出技术(06-20)
- 变频器在高速公路上的应用(06-29)
- 变频器对电机影响的解决方法(08-10)
- 变频器应用中的发热噪声谐波问题及应对措施(09-05)
- 风光高压变频器的电快速脉冲群干扰特点及抑制方法(11-15)
- 高压变频器电动机保护配置(11-26)