详解车载摄像系统电路设计—电路图天天读(286)
视觉导航又叫做图像识别导航,它分为两种方式:一种是有线式,另一种是无线式。无线式的视觉导航技术是利用CCD在系统动态时摄取周围环境的相应的图像资料,并与设定的运行路径在信息数据库中进行比对,进而确定AGV当前地位置,进而经过控制模块对小车的运行路径进行实时的决策。第一种即有线式视觉导航技术是根据AGV现场的具体地面或者路边明显路标,经过车载的摄像装置(CCD)动态地获取路边的图像,再经过车载的计算机进行相应的处理,进而识别出路径的相应标识线,并且判断AGV与期望标识线的距离和与标识线的夹角,进而通过驱动系统控制AGV的实际行驶路径在与期望的路经保持在允许的范围内即可。
有线视觉导航技术的优点是:可以获取较大容量的信息、具体路径的设置与变化比较简单、系统具有较好的柔性等,而且具有现实应用的可行性和比较广阔的前景,是现今AGV的先进的导航技术和重要发展方向。
车载摄像装置主要是由CCD摄像机、图像采集卡、光源等设备组成。摄像装置采集信息的电路原理图见下图:
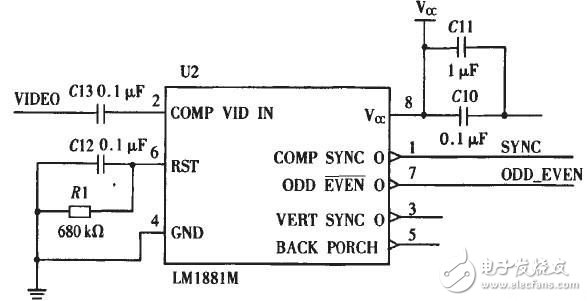
摄像头采集电路图
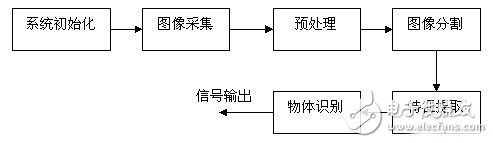
在视觉系统启动后,AGV的车载CCD摄像机就对小车前方的路径进行相应的图像采集,经过图像采集卡后,经过处理后送到相应的上位计算机。AGV的上位计算机经过对地面的信息进行适当图像处理(主要包括阈值处理、掩膜、直方图分析、图像分割、边缘检测、区域增长)与图象分析(主要包括特征摄取、物体识别、位置大小和方向以及图像其它物理特征的分析和较深度的信息处理),进而形成相应的控制指令,再传到车载计算机(单片机),进而控制AGV的相应的动作。视觉系统的工作原理的示意图:
车载摄像头接电源的注意事项
在发动机发动之后,输出电压干扰较大,给倒车灯供电不是纯直流供电,而是叠加了一个脉冲信号在上面,如果有条件可用示波器测试,会发现是一个类似方波的信号。如果倒车监控摄像头不带滤波器(也有人叫整流器),摄像头供电线直接在倒车灯上,则因为工作电压极不稳定导致摄像头工作不正常,,档位切换要经过倒 车档,此时摄像头会加上一个短暂的电压脉冲。这种突发的电压脉冲不利于摄像头中的灵敏电路,可能会缩短其寿命。
由于车载摄像头需要12V供电,而且车载摄像头供电电压过高容易使车载摄像头发热,虽然短时间内信号质量将提高,但长时间会使CCD输出信号质量下降,而车载摄像头供电电压过低会使摄像头信号质量降低。为了保证摄像头的正常供电,12V电路较为复杂且占用电路板空间较大。
倒车时,挂入倒档,显示器便可自动开启并清楚显示车后影像,无须额外操作,全自动程序,方便快捷。
编辑点评:本文简单介绍了车载摄像电路的设计,该摄像运行可靠,倒车时不但能清晰实时显示车后全景,而且还能准确测量汽车与车后障碍物之间的距离,基本达到了设计要求。

- 智能机器人的三大关键技术详解(10-16)
- 详解车载摄像系统电路设计—电路精选(57)(02-13)
- 车载摄像头常见知识与故障处理(02-16)
- 辅助开车的前向驾驶辅助摄像系统是什么?(02-14)
- 一文了解车载摄像头选购标准及如何安装(02-17)
- 一文了解防碰瓷专用神器—行车记录仪(02-15)