一种基于服务机器人的视觉系统设计
系统采用的是一个中断INT0来通知DSP。此时DSP可以读数据也可以不读,视处理的速度来定。读数据时,可利用RD和片选,产生RCK信号。DSP读取的速度不能太快,以读取速度小于写速度为原则。
在对液晶的逻辑时序控制上,由于图像输出的信号是640×480的像素,而液晶的显示为320×240的格式。所以利用CPLD把图像传感器输入的像素时钟信号PCLK进行二分频产生液晶的时钟信号控制液晶的显示,同时对行同步信号进行隔行有效从而达到液晶对图像的显示。CPLD中的程序编写用的采用了硬件描述语言VHDL,在QUARTUSⅡ软件平台上进行编写的。由于在选用芯片时采用的是EPM7064S系列的44脚PLCC封装的,只能工作在5V电压情况下,其输出的高电平信号是5V,必须通过处理才能接入系统中工作在3。3V状态下的芯片器件。
1.4 帧存储器选择
帧存储器有需要外部提供地址线的RAM和不需要外部提供地址线的FIFO,为了简化CPLD的设计。采用了FIFO的帧存储器。FIFO又可以分为基于动态存储的DRAM和基于静态的SRAM。基于静态SRAM的优点是不需要刷新电路,但容量小,需要多片才能存储一帧数据;基于DRAM的优点是容量大,只需一片就能存储一帧数据,缺点是必须有刷新电路。本设计中采用的是Averlogic公司的大容量FIFO动态存储芯片AL422B。其刷新电路比较简单,仅需WCK或RCK提供大于1M的不间断脉冲即可。AL422B的存储容量为3MB,由于系统一帧的信息通常包含640×480个彩色像素,每个像素占用2个字节,可存储1帧图像的完整信息,其工作频率可达50MHz。
1.5 视频处理DSP
在选用DSP时,在兼顾处理速度,存储容量,现有条件下的加工工艺水平,以及性价比方面,选用了TI公司的144脚封装的TMS320VC5509A,此芯片的最高工作频率可达到200MHz,具有很高的处理速度。
DSP收到来自CPLD的读通知信号后开始读取AL422B中的视频数据。为了方便处理数据,在DSP外围扩展了一个的SDRAM。芯片采用的是HYNIX公司的HY57V161610E,此芯片的存储容量为1M×16bits。
当DSP上电复位后,通过采样GPIO0~GPIO3的状态,根据采样的状态来进行什么样方式的程序装载。本系统的采用外接的flash存储芯片的SPI口对DSP进行程序装载,接着通过DSP的I2C口对图像传感器进行寄存器初始化。图像传感器开始输出信号。整个系统开始进入工作。
DSP作为高速的处理器,主要用于图像的处理。由于本视觉系统要完成识别和跟踪功能,数据的处理量是很大的。在完成图像处理的同时,DSP也作为控制器使用完成对控制器的控制,从而构成视觉跟踪系统。
2 软件部分设计
由于本系统采用的是颜色和形状相结合的办法对无遮挡目标物体的识别。为了达到机器人实时快速的目的,在软件方法上,主要采用了目前常用的足球机器人的颜色识别方法,目前比较常见是基于阈值向量的颜色判断法。下面简述颜色识别原理。
2.1 色彩空间选择
对于采用基于彩色图像分割的方法识别目标时,首先要选择合适的颜色空间,常用的颜色空间有RGB、YUV、HSV、CMY等。颜色空间的选择直接影响到图像分割和目标识别的效果。
RGB:是最常用的颜色空间,其中亮度等于R、G、B3个分量之和。RGB颜色空间是不均匀的颜色空间,两个颜色之间的知觉差异与空间中两点间的欧氏距离不成线性比例,而且R、G、B值之间的相关性很高,对同一颜色属性,在不同条件(光源种类、强度和物体反射特性)下,RGB值很分散,对于识别某种特定颜色,很难确定其阈值和其在颜色空间中的分布范围。因此通常会选择能从中分离出亮度分量的颜色空间,其中最常见的是YUV和HSV颜色空间。
HSV:接近人眼感知色彩的方式,H为色调(Hue),S为色饱和度(Saturation),V为亮度(Value)。色调H能准确地反映颜色种类,对外界光照条件变化敏感度低,但是H和S均为R、G、B的非线性变换,存在奇异点,在奇异点附近即使R、G、B的值有很小变化也引起变换值有很大的跳动。
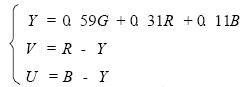
YUV:RGB颜色空间线性变化为的亮度-色彩空间。是为了解决彩色电视机与黑白电视机的兼容问题而提出的。Y表示亮度(Luminance),UV用来表示色差(Chrominance)。YUV表示法的重要性是它的亮度信号(Y)和色度信号(U、V)是相互独立的。所谓色差是指基色信号中的3个分量信号(即R、G、B)与亮度信号之差。
因此,针对以上原因,本系统在采用的是YUV色彩空间。
YUV格式与RGB存在如下关系:
2.2 阈值确定和色彩判断
在确定阈值时,首先通过采集样本进行训练,从而得到预定的几种颜色在YUV空间的分量的上下阈值,
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 萌萌哒的智能机器人前台(09-05)
- 工业机器人过去与现在对比(02-16)
- 大联大世平集团推出RK3288智能机器人解决方案(07-04)
- 基于蓝牙和DSP的家庭医疗保健智能机器人设计方案(07-04)
- 基于MCU的智能家居照护机器人的设计与实现(05-13)