七大前沿科技技术盘点及典型解决方案汇总
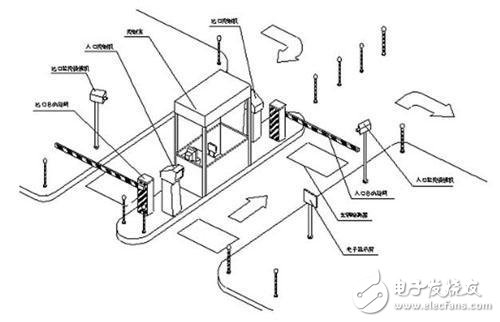
口增加摄像鉴别功能,即:在出入口安装摄像机,进行车辆图像抓拍,并 与读卡联动,通过视频多媒体处理技术联动。

3.系统主要设备与管理软件
3.1 出入口控制机
1) 控制机箱:最新理念设计;密封、防雨、防尘,表面采用喷塑处理,抗腐蚀、耐老化,适合室外环境使用,正常情况下十年不褪色。使用后盖开机箱门,方便打开检查及维护。

2) 卡读写系统:系统采用RFID卡,此卡片有16个分区,可扩展为门禁、考勤、收费、通道管理、巡更等一卡通系统。采用特有的保密通讯协议,安全性强,具有多重相互认证。在停车场系统中使用的感应距离为10CM。
3) 面板信号系统:通过面板提示灯的显示,可指示读写器、 数字式车辆检测器及出卡机是否正常工作。
4) 信息显示屏:中英文LED显示,安装在出入口控制机的正面,智能卡读写器的上方,以文字形式显示停车的出入场时间、收费金额、卡上余额、卡的有效期等相关 信息,若系统不予入场或出场,则显示相关原因,明了直观。在空闲时显示时间日期、欢迎用语、或其他系统相关提示信息。

特点:
1) 采用室外超高亮LED发光管,白天仍然能显示明亮;
2) 采用超载规模集成电路和高性能单片机,系统稳定,升级方便;
3) 中英文滚动显示,内容丰富,人性化的问候;
4) 防雨防水式设计,确保全天候可靠运行;
5) 外观设计新颖,系统分级运行且不影响系统整体性能;
6) 可以根据客户需要,任意更改显示内容;
7) 语音提示:和电子显示屏功能相匹配,以语音的形式同步进行提示,指导用户科学使用停车场。向车主报告停车时间、缴费金额及人性化温暖的语言提示(如"欢迎光临"、"一路顺风")等,提高系统收缴费透明度。
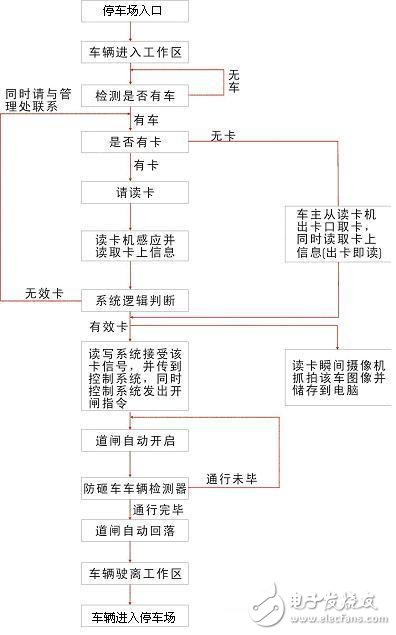
4.系统工作流程
4.1 智能停车进出流程图
4.2 智能停车逻辑判断图
文章详情:智能泊车管理导航系统设计案例
发那科焊接机器人
焊接是工业生产中非常重要的加工方式,同时由于焊接烟尘、弧光和金属飞溅的存在,焊接的工作环境非常恶劣,随着人工成本的逐步提升,以及人们对焊接质量的精益求精,焊接机器人得到了越来越广泛的应用。
机器人在焊装生产线中运用的特点
焊接机器人在高质、高效的焊接生产中发挥了极其重要的作用,其主要特点如下:
1.性能稳定、焊接质量稳定,保证其均一性
焊接参数如焊接电流、电压、焊接速度及焊接干伸长度等对焊接结果起决定性作用。人工焊接时,焊接速度、干伸长等都是变化的,很难做到质量的均一性;采用 机器人焊接,每条焊缝的焊接参数都是恒定的,焊缝质量受人为因素影响较小,降低了对工人操作技术的要求,焊接质量非常稳定。
2.改善了工人的劳动条件
采用机器人焊接后,工人只需要装卸工件,远离了焊接弧光、烟雾和飞溅等;点焊时,工人不再需要搬运笨重的手工焊钳,从大强度的体力劳动中解脱出来。
3.提高劳动生产率
机器人可一天24h连续生产,随着高速、高效焊接技术的应用,使用机器人焊接,效率提高地更加明显。
4.产品周期明确,容易控制产品产量
机器人的生产节拍是固定的,因此安排生产计划非常明确。
5.可缩短产品改型换代的周期,降低相应的设备投资
可实现小批量产品的焊接自动化。机器人与专机的最大区别就是它可以通过修改程序以适应不同工件的生产。
一、FANUC控制系统概述
FANUC机器人主要应用在奇瑞公司乘用车一厂和乘用车三厂的焊装车间,是奇瑞最早引进的焊接机器人,也是奇瑞公司最先用到具有附加轴的焊接机器人。
其控制系统采用32位CPU控制,以提高机器人运动插补运算和坐标变换的运算速度。采用64位数字伺服驱动单元,同步控制6轴运动,运动精度大大提高, 最多可控制到21轴,进一步改善了机器人动态特性。支持离线编程技术,技术人员可通过离线编程软件设置参数,优化机器人运动程序。控制器内部结构相对集成 化,这种集成方式具有结构简单、整机价格便宜、易维护保养等特点。

图1 控制原理图
二、FANUC控制系统内部结构分析
控制器是机器人的核心部分,实现对机器人的动作操作、信号通讯、状态监控等功能。下面以FANUC—F-200iB为例,对其控制系统内部结构和各部分的功能进行分析:
1)电源供给单元
变压器向电源分配单元输入230V交流电,通过该单元的系统电源分配功能对控制箱内部各工作板卡输出210V交流电及±15V、+24V直流电。
2)安全保护回路
由变压器直接向急停单元供电,并接入
- 3D打印渐入佳境 智能机器人成香饽饽(02-24)
- 2015十大智能医疗黑科技盘点(02-25)
- 中国智能电网的机遇与创新(02-22)
- 汽车零部件产业3D打印技术的应用(07-08)
- 麻省理工科技评论评选的14大医疗领域突破科技(下)(10-14)
- 盘点:工业互联网的九大核心技术(08-10)